سپهر ایرانیان
بنام خداوند گردون سپهر خداوند ماه و خداوند مهرسپهر ایرانیان
بنام خداوند گردون سپهر خداوند ماه و خداوند مهربرق صنعتی_الکترونیک
دیود چیست ؟
از اتصال دولایه p & n دیود درست می شود
1- بعد از پیوند نیمه هادی نوع p & n کنار یکدیگر ، الکترونهای آزاد و حفره ها از محل پیوند عبور کرده ، با هم ترکیب می شوند و تشکیل یک لایه سد یا عایق می دهند .
2- یک منطقه تخلیه در محل پیوند ها ایجاد می شود که فاقد الکترونهای آزاد و حفره ها می باشد ، لکن اتمهایی که الکترون از دست داده و یا گرفته اند ، در دو طرف لایه سد و در منطقه تخلیه وجود دارند .
3- اتمهای یونیزه شده ، ایجاد سد پتانسیل می کنند که برای نیمه هادی ژرمانیومی حدود ۰.۲ ولت است و برای نیمه هادی سیلسیمی حدود ۰.۶ ولت است .
4- سد پتانسیل باعث که از حرکت و ترکیب بیشتر الکترونها و حفره ها در لایه سد جلوگیری به عمل آید .
5- کریستال نیمه هادی نوع p دارای بار الکتریکی مثبت و کریستال نیمه هادی n دارای بار الکتریکی منفی می باشد .
بایاس دیود
وصل کردن ولتاژ به دیود را بایاس کردن دیود می گویند .
بایاس مستقیم
اگرنیمه هادی نوع p به قطب مثبت باتری و نیمه هادی نوع n به قطب منفی آن وصل شود و ولتاژ از پتانسیل سد دیود بیشترباشد ، در مدار جریان بر قرار خواهد شد .
بایاس معکوس
اگر قطب مثبت باتری به نیمه هادی نوع n وصل شود و قطب منفی باتری به نیمه هادی نوع p وصل شود ، جریانی در مدار نخواهیم داشت .
تست دیود
همانطور که گفته شد اگر دوید در بایاس موافق یا معکوس قرار بگیرد جریان را از خود عبور می دهد و ما می توانیم دیود را با یک مدار ساده سری کنیم ( البته با رعایت قطبهای دیود و باتری ) اگر مدار شروع به کار کرد پس دیود سالم است و در غیر این صورت دیود سوخته شده است .
انواع دیود ها
1- دیود اتصال نقطه ای
2- دیود زنر
3- دیود نور دهنده LED
4- دیود خازنی ( واراکتور )
5- فتو دیود
دیود اتصال نقطه ای
دیود های معمولی در بایاس معکوس ایجاد ظرفیت خازنی ( حدود PF ) می کنند . اگر بخواهیم در فرکانس های بالا به کار می بریم ، به علت ظرفیت خازنی در بایاس معکوس ، جریان در مدار عبور می کند . چون در فرکانس های بالا مقاومت دیود کم می شود . برای جلوگیری از این کار از دیود اتصال نقطه ای استفاده می کنیم
دیود زنر
دیود زنر ، مانند یک دیود معمولی از دو نیمه هادی نوع P & N ساخته می شود . اگر یه دیود معمولی را در بایاس معکوس اتصال دهیم و ولتاژ معکوس را زیاد کنیم ، در یک ولتاژ خاص ، دیود در بایاس معکوس نیز شروع به هدایت می کند . ولتاژی که دیود در بایاس مخالف ، شروع به هدایت می کند ، به ولتاژ زنر معروف است و با تنظیم نا خالصی می توان ولتاژ شکسته شدن پیوند ها را کنترل کرد
ولتاژ زنر : ولتاژی که دیود زنر به ازای آن در بایاس معکوس ، هادی می شود به ولتاژ زنر معروف است .
دیود نوردهنده LED
این دوید از دو نوع نیمه هادی P & N تشکیل شده است . هر گاه این دیود ، در بایاس مستقیم ولتاژی قرار گیرد و شدت جریان به اندازه کافی باشد ، دیود ، از خود نور تولید می کند . نور تولید شده در محل اتصال دو نیمه هادی تشکیل می شود . نور تولیدی بستگی به جنس به کار برده شده در نیمه هادی دارد . این لامپ چند مزایا بر لامپ های معمولی دارد که عبارتند از :
1- کوچک بودن و نیاز به فضای کم
2- محکم بودن و داشتن عمر طولانی ( حدود صد هزار ساعت کار )
3- قطع و وصل سریع نور
4- تلفات حرارتی کم
5- ولتاژ کار کم ، بین ۱.۷ ولت تا 3.3 ولت
6- جریان کم حدود چند میلی آمپر با نور قابل رویت
7- توان کم ، حدود ۱۰ تا ۱۵۰ میلی وات
دیود خازنی ( واراکتور )
این دیود از دو نیمه هادی نوع P & N تشکیل می شود . دیود خازنی در واقع دیودی است که به جای خازن بکار می رود و مقدار ظرفیت آن با ولتاژ دو سر آن رابطه عکس دارد
فتو دیود
این دیود از دو نیمه هادی نوع P & N تشکیل می شود . با این تفاوت که محل پیوند P & N ، جهت تابانیدن نور به آن از مواد پلاستیکی سیاه پوشیده نمی باشد ، بلکه توسط شیشه و یا پلاستیک شفاف پوشیده می گردد تا نور بتواند با آسانی به آن بتابد . روی اکتر فتو دیود ها یک لنز بسیار کوچک نصب می شود تا بتواند نور تابانیده شده به آن را متمرکز کرده و به محل پیوند برساند .
دیودها جریان الکتریکی را در یک جهت از خود عبور میدهند و در جهت دیگر در مقابل عبور جریان از خود مقاومت بالایی نشان میدهند. این خاصیت آنها باعث شده بود تا در سالهای اولیه ساخت این وسیله الکترونیکی ، به آن دریچه یا Valve هم اطلاق شود. از لحاظ الکتریکی یک دیود هنگامی عبور جریان را از خود ممکن میسازد که شما با برقرار کردن ولتاژ در جهت درست (+ به آند و - به کاتد) آنرا آماده کار کنید. مقدار ولتاژی که باعث میشود تا دیود شروع به هدایت جریان الکتریکی نماید ولتاژ آستانه یا (forward voltage drop) نامیده میشود که چیزی حدود ۰.۶ تا ۰.۶ ولت میباشد.

ولتاژ معکوس
هنگامی که شما ولتاژ معکوس به دیود متصل میکنید (+ به کاتد و - به آند) جریانی از دیود عبور نمیکند، مگر جریان بسیار کمی که به جریان نشتی یا Leakage معرف است که در حدود چند µA یا حتی کمتر میباشد. این مقدار جریان معمولآ در اغلب مدارهای الکترونیکی قابل صرفنظر کردن بوده و تأثیر در رفتار سایر المانهای مدار نمیگذارد. اما نکته مهم آنکه تمام دیودها یک آستانه برای حداکثر ولتاژ معکوس دارند که اگر ولتاژ معکوس بیش از آن شود دیود میسوزد و جریان را در جهت معکوس هم عبور میدهد. به این ولتاژ آستانه شکست یا Breakdown گفته میشود.

دسته بندی دیودها
در دسته بندی اصلی ، دیودها را به سه قسمت اصلی تقسیم میکنند، دیودهای سیگنال (Signal) که برای آشکار سازی در رادیو بکار میروند و جریانی در حد میلی آمپر از خود عبور میدهند، دیودهای یکسو کننده (Rectifiers) که برای یکسو سازی جریانهای متناوب بکار برده میشوند و توانایی عبور جریانهای زیاد را دارند و بالاخره دیودهای زنر (Zener) که برای تثبیت ولتاژ از آنها استفاده میشود.
اختراع دیود پلاستیکی (plastic diode)
محققان فیزیک دانشگاه اوهایو (Ohio State University) توانستند دیود تونل پلیمری اختراع کنند. این قطعه الکترونیکی منجر به ساخت نسل آینده حافظههای پلاستیکی کامپیوتری و چیپهای مدارات منطقی خواهد شد. این قطعات کم مصرف و انعطاف پذیر خواهند بود. ایده اصلی از سال ۲۰۰۳ که یک دانشجوی کارشناسی دانشگاه اوهایو ، سیتا اسار ، شروع به طراحی سلول خورشیدی پلاستیکی نمود بوجود آمد. تیم پژوهشی توسط پاول برگر (Paul Berger) ، پروفسور الکترونیک و مهندسی کامپیوتر و همچنین پروفسور فیزیک دانشگاه اوهایو رهبری میشود.
دیود چیست 2 ؟
از اتصال دولایه p & n دیود درست می شود
۱- بعد از پیوند نیمه هادی نوع p & n کنار یکدیگر ، الکترونهای آزاد و حفره ها از محل پیوند عبور کرده ، با هم ترکیب می شوند و تشکیل یک لایه سد یا عایق می دهند .
۲- یک منطقه تخلیه در محل پیوند ها ایجاد می شود که فاقد الکترونهای آزاد و حفره ها می باشد ، لکن اتمهایی که الکترون از دست داده و یا گرفته اند ، در دو طرف لایه سد و در منطقه تخلیه وجود دارند .
۳- اتمهای یونیزه شده ، ایجاد سد پتانسیل می کنند که برای نیمه هادی ژرمانیومی حدود ۰.۲ ولت است و برای نیمه هادی سیلسیمی حدود ۰.۶ ولت است .
۴- سد پتانسیل باعث که از حرکت و ترکیب بیشتر الکترونها و حفره ها در لایه سد جلوگیری به عمل آید .
۵- کریستال نیمه هادی نوع p دارای بار الکتریکی مثبت و کریستال نیمه هادی n دارای بار الکتریکی منفی می باشد .
بایاس دیود
وصل کردن ولتاژ به دیود را بایاس کردن دیود می گویند .
بایاس مستقیم
اگرنیمه هادی نوع p به قطب مثبت باتری و نیمه هادی نوع n به قطب منفی آن وصل شود و ولتاژ از پتانسیل سد دیود بیشترباشد ، در مدار جریان بر قرار خواهد شد .
بایاس معکوس
اگر قطب مثبت باتری به نیمه هادی نوع n وصل شود و قطب منفی باتری به نیمه هادی نوع p وصل شود ، جریانی در مدار نخواهیم داشت .
تست دیود
همانطور که گفته شد اگر دوید در بایاس موافق یا معکوس قرار بگیرد جریان را از خود عبور می دهد و ما می توانیم دیود را با یک مدار ساده سری کنیم ( البته با رعایت قطبهای دیود و باتری ) اگر مدار شروع به کار کرد پس دیود سالم است و در غیر این صورت دیود سوخته شده است .
انواع دیود ها
۱- دیود اتصال نقطه ای
۲- دیود زنر
۳- دیود نور دهنده LED
۴- دیود خازنی ( واراکتور )
۵- فتو دیود
دیود اتصال نقطه ای
دیود های معمولی در بایاس معکوس ایجاد ظرفیت خازنی ( حدود PF ) می کنند . اگر بخواهیم در فرکانس های بالا به کار می بریم ، به علت ظرفیت خازنی در بایاس معکوس ، جریان در مدار عبور می کند . چون در فرکانس های بالا مقاومت دیود کم می شود . برای جلوگیری از این کار از دیود اتصال نقطه ای استفاده می کنیم
دیود زنر
دیود زنر ، مانند یک دیود معمولی از دو نیمه هادی نوع P & N ساخته می شود . اگر یه دیود معمولی را در بایاس معکوس اتصال دهیم و ولتاژ معکوس را زیاد کنیم ، در یک ولتاژ خاص ، دیود در بایاس معکوس نیز شروع به هدایت می کند . ولتاژی که دیود در بایاس مخالف ، شروع به هدایت می کند ، به ولتاژ زنر معروف است و با تنظیم نا خالصی می توان ولتاژ شکسته شدن پیوند ها را کنترل کرد
ولتاژ زنر : ولتاژی که دیود زنر به ازای آن در بایاس معکوس ، هادی می شود به ولتاژ زنر معروف است .
دیود نوردهنده LED
این دوید از دو نوع نیمه هادی P & N تشکیل شده است . هر گاه این دیود ، در بایاس مستقیم ولتاژی قرار گیرد و شدت جریان به اندازه کافی باشد ، دیود ، از خود نور تولید می کند . نور تولید شده در محل اتصال دو نیمه هادی تشکیل می شود . نور تولیدی بستگی به جنس به کار برده شده در نیمه هادی دارد . این لامپ چند مزایا بر لامپ های معمولی دارد که عبارتند از :
۱- کوچک بودن و نیاز به فضای کم
۲- محکم بودن و داشتن عمر طولانی ( حدود صد هزار ساعت کار )
۳- قطع و وصل سریع نور
۴- تلفات حرارتی کم
۵- ولتاژ کار کم ، بین ۱.۷ ولت تا ۳.۳ ولت
۶- جریان کم حدود چند میلی آمپر با نور قابل رویت
۷- توان کم ، حدود ۱۰ تا ۱۵۰ میلی وات
دیود خازنی ( واراکتور )
این دیود از دو نیمه هادی نوع P & N تشکیل می شود . دیود خازنی در واقع دیودی است که به جای خازن بکار می رود و مقدار ظرفیت آن با ولتاژ دو سر آن رابطه عکس دارد
فتو دیود
این دیود از دو نیمه هادی نوع P & N تشکیل می شود . با این تفاوت که محل پیوند P & N ، جهت تابانیدن نور به آن از مواد پلاستیکی سیاه پوشیده نمی باشد ، بلکه توسط شیشه و یا پلاستیک شفاف پوشیده می گردد تا نور بتواند با آسانی به آن بتابد . روی اکتر فتو دیود ها یک لنز بسیار کوچک نصب می شود تا بتواند نور تابانیده شده به آن را متمرکز کرده و به محل پیوند برساند .
دیودهای سیگنال
این نوع از انواع دیودها برای پردازش سیگنالهای ضعیف - معمولا” رادیویی - و کم جریان تا حداکثر حدود ۱۰۰mA کاربرد دارند. معروفترین و پر استفاده ترین آنها که ممکن است با آن آشنا باشید دیود ۱N۴۱۴۸ است که از سیلیکون ساخته شده است و ولتاژ شکست مستقیم آن ۰.۷ ولت است.
اما برخی از دیود های سیگنال از ژرمانیم هم ساخته می شوند، مانند OA۹۰ که ولتاژ شکست مستقیم پایینتری دارد، حدود ۰.۲ ولت. به همین دلیل از این نوع دیود بیشتر برای آشکار سازی امواج مدوله شده رادیویی استفاده می شود.
بصورت یک قانون کلی هنگامی که ولتاژ شکست مستقیم دیوید خیلی مهم نباشد، از دیودهای سیلیکون استفاده می شود. دلیل آن مقاومت بهتر آنها در مقابل حرارت محیط یا حرارت هنگام لحیم کاری و نیز مقاومت الکتریکی کمتر در ولتاژ مستقیم است. همچنین دیود های سیلیکونی سیگنال معمولا” در ولتاژ معکوس جریان نشتی بسیار کمتری نسبت به نوع ژرمانیم دارند.
از کاربرد دیگری که برای دیودهای سیگنال وجود دارد می توان به استفاده از آنها برای حفاظت مدار هنگامی که رله در یک مدار الکترونیکی قرار دارد نام برد. هنگامی که رله خاموش می شود تغییر جریان در سیم پیچ آن میتواند در دوسر آن ولتاژ بسیار زیادی القا کند که قرار دادن یک دیود در جهت مناسب میتواند این ولتاژ را خنثی کند. به شکل اول توجه کنید.
استفاده از دیود زنر برای تهیه ولتاژ ثابت دیودهای زنر :
همانطور که قبلا” اشاره کردیم از این دیودها برای تثبیت ولتاژ استفاده می شود. این نوع از دیود ها برای شکسته شدن با اطمینان در ولتاژ معکوس ساخته شده اند، بنابراین بدون ترس می توان آنها را در جهت معکوس بایاس کرد و از آنها برای تثبیت ولتاژ استفاده نمود. به هنگام استفاده از آنها معمولا” از یک مقاومت برای محدود کردن جریان بطور سری نیز استفاده می شود. به شکل نگاه کنید به این طریق شما یک ولتاژ رفرنس دقیق بدست آورده اید.
دیودهای زنر معمولا” با حروفی که در آنها Z وجود دارد نامگذاری می شوند مانند BZX یا BZY و … و ولتاژ شکست آنها نیز معمولا” روی دیود نوشته می شود، مانند ۴V۷ که به معنی ۴.۷ ولت است. همچنین توان تحمل این دیود ها نیز معمولا” مشخص است و شما هنگام خرید باید آنرا به فروشنده بگویید، در بازار نوع ۴۰۰mW و ۱.۳W آن بسیار رایج است.
ترانزیستور
در سالهای 1904تا 1947 لامپها تنها وسایل الکترونیکی بودند که برای تقویت مورد استفاده قرار می گرفتند . در سال 1906لامپ سه قطبی توسط لی دی فورست ساخته شد و در سال 1930 لامپ های چهار قطبی ( تترود ) و پنج قطبی ( پنتود ) نیز ساخته شدند . در سال های بعد ، صنعت الکترونیک به عنوان یک صنعت اصلی و مهم با قابلیت توسعه بسیار ، مورد توجه قرار گرفت . در 23 دسامبر 1947 صنعت الکترونیک به موفقیت جدیدی دست یافت . دربعد از ظهر این روز والتربراتین و جان باردین عمل تقویت سیگنال را توسط اولین ترانزیستوری که در لابراتوار کمپانی بل ، طراحی . ساخته شده بود ، انجام دادند .
برتریهای ترانزیستور بر لامپ های الکترونی
بعد از اختراع ترانزیستور ، برتریهای این المان نسبت به لامپهای الکترونی ، به زودی آشکار گشت . به طوری که در رادیو و تلویزیون و هم همچنین مدارات الکترونی ترانزیستوری ، بلافاصله ساخته شدند . در زیر به برخی از برتریهای ترانزیستود نسبت به لامپ های الکترونی اشاره شده است .
الف: کوچک تر و سبک تر بودن
ب : احتیاج نداشتن به فیلامان و در نتیجه ، نداشتن تلفات حرارتی تاشی از گرم کردن فیلامان
ج : احتیاج نداشتن به مدت زمان جهت گرم شدن فیلامان
د : کار کردن در ولتاژ های بسیار کم
و : استحکام زیاد و داشتن عمر طولانی
ز : ساده بودن سیم کشی طراحی های ترانزیستوری
باید توجه داشت که لامپها نیز نسبت به ترانزیستور ها از برتری هایی برخوردارند ، از جمله : قدرت بسیار بالا ، تغییر نکردن نقطه کار بر اثر گرما و ... ولی ترانزیستور با داشتن برتریهای فوق در قدرتهای کم و متوسط جانشین لامپها شده است .
ساختمان ترانزیستور
ترانزیستور معمولی ، یک المان سه قطبی است که از سه کریستال نیمه هادی نوع nو p که در کنار یک دیگر قرار میگیرند تشکیل شده است . ترتیب قرار گرفتن نیمه هادی ها در کنار هم ، می تواند به دو صورت انجام پذیرد :
الف : دو قطعه نیمه هادی نوع n در دو طرف و نیمه هادی نوع p در وسط .
ب: دو قطعه نیمه هادی نوع p در دو طرف و نیمه هادی نوع n در وسط .
در حالت (الف) ترانزیستور npn و در حالت (ب) تورانزیستور pnp می نامند .
![]()
![]()
پایه های خروجی ترانزیستور را به ترتیب امیتر ( منتشر کننده ) ، بیس ( پایه ) و کلکتور ( جمع کننده ) نامگذاری کرده اند . امیتر را با حرف E ، بیس را با حرف B و کلکتور را با حرف C نشان می دهند . پایه های ترانزیستور را می توان با پایه های لامپ تریود از نظر نوع عملکرد به شرح زیر مقایسه نمود :
الف : امیتر با کاتد E=K
ب : بیس با شبکه فرمان B=G
ج : کلکتور با آند C=A
نیمه هادی نوع N یا P به عنوان امیتر به کار می روند ، نسبت به لایه و کلکتور دارای ناخالصی بیشتری می باشد . ضخامت این لایه حدود چند ده میکرون است . و سطح تماس آن نیز بستگی به میزان فرکانسی و قدرت ترانزیستور دارد .
لایه بیس نسبت به کلکتور دارای ناخالصی کمتری است و ضخامت آن نیز به مراتب کمتر از امیتر و کلکتور می باشد و عملا از چند میکرون تجاوز نمی کند .
ناخالصی لایه کلکتور از امیتر کمتر و از بیس بیشتر است . ضخامت این لایه به مراتب بزرگتر از امیتر می باشد ، زیرا تقریبا تمامی تلفات حرارتی ترانزیستور در کلکتور ایجاد می شود .
این نوع ترانزیستورها را به اختصار BJT (Bipolar Junction Transistor ) می نامند .
عملکرد ترانزیستور
1- بایاسینگ ترانزیستور : برای اینکه بتوان از ترانزیستور به عنوان تقویت کننده ، سوییچ و ... استفاده نمود ، باید ابتدا ترانزیستور را از نظر ولتاژDC تغذیه کرد ، عمل تغذیه ولتاژ پایه های ترانزیستور را بایاسینگ ترانزیستور می گویند . با توجه به اینکه ترانزیستور دارای سه پایه می باشد می توانیم یکی از پایه هارا به عنوان مشترک و دو پایه دیگر را به عنوان ورودی و خروجی در نظر بگیریم . اتصال ولتاژ DC به پایه های مختلف ترانزیستور نحوه کار آن را بیان می کند . چون پایه های ترانزیستور سه عدد است ، لذا می توانیم ولتاژ dc را به فرمهای مختلف به ترانزیستور متصل کنیم .
انواع آرایش های ترانزیستور


شکل پایه های ترانزیستورها و قطعات رایج و مشابهات آنها
| NPN | PNP | شکل | NPN | PNP | شکل |
| BC107 BC108 BC109 | BC177 BC178 BC179 | BC147 BC148 BC149 | BC157 BC158 BC159 | ||
| BC167 BC168 BC169 | BC257 BC258 BC259 | BC171 BC172 BC173 BC182 BC183 BC184 | BC251 BC252 BC253 BC212 BC213 BC214 | ||
| BC207 BC208 BC209 | BC204 BC205 BC206 | BC237 BC238 BC239 | BC307 BC308 BC309 | ||
| BC317 BC318 BC319 BC337 BC347 BC348 BC349 BC382 BC383 BC384 | BC320 BC321 BC322 BC327 BC350 BC351 BC352 | BC407 BC408 BC409 | BC417 BC418 BC419 | ||
| BC413 BC414 | BC415 BC416 | BC437 BC438 BC439 | |||
| BC467 BC468 BC469 | BC547 BC548 BC549 BC582 BC583 BC584 | BC557 BC558 BC559 BC512 BC513 BC514 | |||
| BC261 BC262 BC263 | 2N3903 2N3904 | 2N3905 2N3906 | |||
| 9013 9014 | 9012 9015 | TIP3055 | TIP2955 | ||
| BD131 BD139 BD263 | BD132 BD140 BD262 | MJE 3055T BD267A TIP31A TIP41A | MJE 2955T BD266A TIP32A TIP42A | ||
| 2N3055 | MJ2955 | 2N3054 | |||
| 2N2222A | Darlington TIP121 TIP132 | Darlington TIP126 TIP137 | |||
| Positive Voltage Regulator 1amp 7805 7812 LM2940 | Negative Voltage Regulator 1amp 7905 7912 | ||||
| Positive Voltage Regulator Adjustable LM317 (1.5amp) LM350 (3amp) | Positive Voltage Regulator 100mA 78L05 78L12 | ||||
| Negative Voltage Regulator 100mA 79L05 79L12 | Darlington TIP141 | Darlington TIP146 |
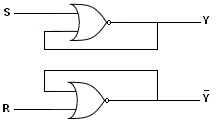
فلیپ فلاپ SR
 |
فلیپ فلاپ SR یک المان فیزیکی است که می تواند به عنوان یک عنصر تاخیر دهنده به کار گرفته شود. این المان فیزیکی دارای دو ورودی به نام های R و S می باشد و دو خروجی دارد که یکی متمم دیگری است.
طرز کاراین فلیپ فلاپ در جدول صحت به این شکل است که وقتی عملکرد مدار را بررسی می کنیم اگر S=1 و R=0 باشد، اصطلاحا می گویند مدار set است یعنی خروجی آن 1 شده است. اگر پس از آن S=0 شود، مدار در وضعیت set باقی می ماند ولی اگر R=1 شود اصطلاحا می گویند مدار Reset شده است یعنی خروجی در این لحظه صفر است، و اگر در این لحظه R=0 شود مدار در حالت Reset باقی می ماند. بنابراین R=0 و S=0 در خروجی نشان می دهد که کدامیک از S یا R آخرین بار برابر 1 بوده است. یعنی مدار آخرین وضعیت غیر صفر ورودی را به خاطر سپرده است. مطابقجدول کارنو اگر R و S همزمان در حالت 1 قرار گیرند مدار در حالت نامشخص خواهد بود. به این خاطر مدارهای دارای فلیپ فلاپ SR را طوری طراحی می کنند که هیچ گاه ورودی های S و R همزمان برابر 1 نشود.
این مورد محدودیتی برای فلیپ فلاپ SR است، که در فلیپ فلاپ JK این نقص برطرف شده است.
فلیپ فلاپ JK
این عنصر تاخیر دهنده دارای دو ورودی به نام J و K می باشد و دو خروجی آن یکی متمم دیگری است و در آن محدودیت فلیپ فلاپ SR را رفع کرده اند و دو ورودی J=1 و 1=K برای این مدار قابل قبول است.
در این فلیپ فلاپ همانند نوع SR ورودی تمام صفر یعنی J=0 و K=0 تاثیری در حالت خروجی فلیپ فلاپ ندارد و همان حالت قبلی حفظ می شود. ولی اگر J=1 و 1=K باشد یک ورودی قابل قبول است که باعث تغییر حالت در مقدار خروجی می شود.
 |
فلیپ فلاپ T
 |
این عنصر تاخیر دهنده دارای یک ورودی به نام T است و دو خروجی به صورت Y و متمم آن دارد.
چنانچه T=1 شود باعث تغییر در خروجی می شود یعنی اگر خروجی صفر باشد مقدار آن یک می شود و برعکس اگر خروجی یک باشد مقدار آن صفر می شود. این فلیپ فلاپ را به این خاطر فلیپ فلاپ جهشی نیز می نامند.
فلیپ فلاپ T همانند فلیپ فلاپ JK است که دو ورودی آن از یک متغیر مقدار می گیرد یعنی یا هر دو J و K مقدار صفر و یا هر دو مقدار یک دارند. به این ترتیب در مواقعی یک است، ایجاد جهش می کند.
فلیپ فلاپ D
این مدار تاخیر دهنده شبیه به یک عنصر تاخیر دهنده ساعت عمل می کند به این ترتیب که هر ورودی به آن می دهیم در یک فاصله زمانی مشخصی بعدا همان ورودی را به صورت خروجی دریافت می کنیم.
از این رو این فلیپ فلاپ را فلیپ فلاپ تاخیر (Delay) می نامند. این فلیپ فلاپ یک ورودی به نام D دارد.

توسط مداری که در دسترس شماست ، میتوانید از سالم یا معیوب بودن انواع ترانزیستورهای مثبت و منفی آگاه شوید . این کیت جنبه آموزشی و آماتوری داشته و برای هر علاقمند و آماتور توصیه میشود .
در استفاده های حرفه ای نیاز است که استفاده کننده دارای یک کتاب مشابهات ترانزیستور نیز باشد تا قبل از اقدام به تست یک ترانزیستور از مثبت یا منفی بودن آن و یا ترتیب پایه هایش ( از نظر بیس ، اِمیتر و کلکتور ) مطلع شود . شرکت مشهد کیت بعنوان هدیه ، ضمیمه ای همراه این کیت تقدیم نموده که در آن شکل ، نوع و ترتیب پایه ها ی ترانزیستورهای رایج در بازار نشانداده شده است که میتواند مورد استفاده علاقمندان قرار گیرد .
در کتابهای مشخصات ترانزیستور ، ترانزیستورهای منفی با عبارت N و ترانزیستورهای مثبت با عبارت P مشخص شده اند . همچنین برای شناسائی مثبت یا منفی بودن یک ترانزیستور ، یک قائده کلی وجود دارد و آن این است که پایه امیتر ترانزیستورهای مثبت ، همواره به قطب مثبت و پایه کلکتور آن به قطب منفی متصل است ( البته این امر ممکن است با مقدار مقاومت ناچیزی انجام شود ). بعبارتی پایه کلکتور ترانزیستورهای مثبت ، نسبت به پایه امیترشان ، دارای ولتاژ منفی است.
در نصب دیودهای نورانی چنان عمل شود که پایه کوتاهتر آنها در خانه های با علامت پخی قرار گیرد .
ترانزیستور چنان نصب شود که از نظر سطح مقطع دقیقاً بر شکل روی فیبر منطبق شود .
منبع تغذیه این کیت 6 ولت است و میتوان آن را از 4 باتری قلمی تامین نمود و با رعایت قطب مثبت و منفی به محل BAT متصل نمود
منبع تغذیه این کیت 6 ولت است و میتوان آن را از 4 باتری قلمی تامین نمود و با رعایت قطب مثبت و منفی به محل BAT متصل نمود.
قبل از استفاده ، برای سهولت کار میتوانید 6 عدد گیره سوسماری تهیه و به نقاط B , E , C که در دو طرف فیبر مشخص شده متصل کنید تا اتصال پایه های ترانزیستور مورد آزمایش به این نقاط براحتی انجام شود .
برای آزمایش یک ترانزیستور ابتدا باید بدانید که آیا مثبت است یا منفی . همانطور که در ابتدا گفته شد برای این کار میتوان به کتابهای راهنمای ترانزیستور مراجعه نمود ( البته خلاصه ای از وضعیت ترانزیستورهای رایج در ایران ضمیمه این کیت است ) پس از تشخیص مثبت و یا منفی بودن ، باید ترانزیستور مورد آزمایش را با رعایت پایه های بیس B و امیتر E و کلکتور C به نقاط مشخص شده روی فیبر متصل نمود . توجه شود که اگر ترانزیستور مورد آزمایش منفی است از نقاط بیس B و امیتر E و کلکتور C سمت راست فیبر که در بالای آن عبارت NPN نوشته شده و برای ترانزیستورهای مثبت از نقاط بیس B و امیتر E و کلکتور C سمت راست که در بالای آن عبارت PNP نوشته شده استفاده نمائید . پس از نصب ترانزیستور به محل مورد نظر ، کلید فشاری را فشار دهید . اگر با فشار دادن کلید فشاری دیود نورانی مربوط به همان طرف روشن شد ، ترانزیستور سالم است . حال اگر قبل از فشار دادن کلید فشاری دیود روشن شود یا پس از فشار دادن کلید ، دیود روشن نشود ، به معنای معیوب بودن ترانزیستور مورد آزمایش است . برای تست یک ترانزیستور مثبت نیز دقیقا همین روش انجام میشود ، با این تفاوت که از نقاط سمت چپ مدار برای تست استفاده میشود و دیود نورانی مورد نظر ، همان دیود سمت چپ خواهد بود .
کد قطعه | مشخصات قطعه |
R5 , R1 | 820 اُهم ( طوسی – قرمز – قهوه ای ) |
R2 | 2/2 کیلو ( قرمز – قرمز – قرمز ) |
R3 | 10 کیلو ( قهوه ای – سیاه – نارنجی ) |
R4 | 3/3 کیلو ( نارنجی – نارنجی – قرمز ) |
TR | ترانزیستور منفی C945 یا یک عدد مشابه |
L2 , L1 | دو عدد دیود نورانی |
SW | کلید فشاری کوچک ( میکروسویچ ) |
انواع موتورهای الکتریکی موتورهای DC : یکی از اولین موتورهای
دوار، اگر نگوییم اولین، توسط میشل فارادی در سال 1821م ساخته شده بود و شامل یک
سیم آویخته شده آزاد که در یک ظرف جیوه غوطه ور بود، می شد. یک آهنربای دائم در
وسط ظرف قرار داده شده بود. وقتی که جریانی از سیم عبور می کرد، سیم حول آهنربا به
گردش در می آمد و نشان می داد که جریان منجر به افزایش یک میدان مغناطیسی دایرهای
اطراف سیم می شود. این موتور اغلب در کلاس های فیزیک مدارس نشان داده می شود، اما
گاهاً بجای ماده سمی جیوه، از آب نمک استفاده می شود. موتورهای میدان سیم پیچی شده آهنرباهای دائم در
(استاتور) بیرونی یک موتور DC را
میتوان با آهنرباهای الکتریکی تعویض کرد. با تغییر جریان میدان (سیم پیچی روی
آهنربای الکتریکی) می توانیم نسبت سرعت/گشتاور موتور را تغییر دهیم. اگر سیم پیچی
میدان به صورت سری با سیم پیچی آرمیچر قرار داده شود، یک موتور گشتاور بالای کم
سرعت و اگر به صورت موازی قرار داده شود، یک موتور سرعت بالا با گشتاور کم خواهیم
داشت. می توانیم برای بدست آوردن حتی سرعت بیشتر اما با گشتاور به همان میزان
کمتر، جریان میدان را کمتر هم کنیم. این تکنیک برای ترکشن الکتریکی و بسیاری از
کاربردهای مشابه آن ایده آل است و کاربرد این تکنیک می تواند منجر به حذف تجهیزات
یک جعبه دنده متغیر مکانیکی شود. موتورهای یونیورسال یکی از انواع موتورهای DC میدان سیم پیچی شده موتور ینیورسال است. اسم این موتورها از این
واقعیت گرفته شده است که این موتورها را می توان هم با جریان DC و هم AC
بکار برد، اگر چه که اغلب عملاً این موتورها با تغذیه AC کار می کنند. اصول کار این موتورها بر این اساس است که وقتی یک
موتور DC میدان سیم پیچی شده به
جریان متناوب وصل می شود، جریان هم در سیم پیچی میدان و هم در سیم پیچی آرمیچر (و
در میدانهای مغناطیسی منتجه) همزمان تغییر می کند و بنابراین نیروی مکانیکی ایجاد
شده همواره بدون تغییر خواهد بود. در عمل موتور بایستی به صورت خاصی طراحی شود تا
با جریان AC سازگاری داشته باشد
(امپدانس/رلوکتانس بایستی مدنظر قرار گیرند)، و موتور نهایی عموماً دارای کارایی
کمتری نسبت به یک موتور معادل DC
خالص خواهد بود. مزیت این موتورها این است که میتوان تغذیه ی AC را روی موتورهایی که دارای مشخصه های نوعی موتورهای DC هستند بکار برد، خصوصاً اینکه این موتورها دارای گشتاور راه
اندازی بسیار بالا و طراحی بسیار جمع و جور در سرعتهای بالا هستند. جنبه منفی این
موتورها تعمیر و نگهداری و مشکل قابلیت اطمینان آنهاست که به علت وجود کموتاتور
ایجاد می شود و در نتیجه این موتورها به ندرت در صنایع مشاهده می شوند اما عمومی
ترین موتورهای AC در دستگاه هایی نظیر
مخلوط کن و ابزارهای برقی ای که گاهاً استفاده می شوند، هستند. موتورهای AC عموماً ما دارای دو نوع
از موتورهای AC هستیم: تک فاز و سه
فاز. موتورهای AC تک فاز معمول ترین موتور تک
فاز موتور سنکرون قطب چاکدار است، که اغلب در دستگاه هایی بکار می رود که گشتاور
پایین نیاز دارند، نظیر پنکه های برقی، اجاق های ماکروویو و دیگر لوازم خانگی
کوچک. موتورهای AC سه فاز برای کاربردهای نیازمند
به توان بالاتر، از موتورهای القایی سه فاز AC (یا چند فاز) استفاده می شود. این موتورها از اختلاف فاز موجود
بین فازهای تغذیه چند فاز الکتریکی برای ایجاد یک میدان الکترومغناطیسی دوار
درونشان، استفاده می کنند. اغلب، روتور شامل تعدادی هادی های مسی است که در فولاد
قرار داده شده اند. از طریق القای الکترومغناطیسی میدان مغناطیسی دوار در این هادی
ها القای جریان می کند، که در نتیجه منجر به ایجاد یک میدان مغناطیسی متعادل کننده
شده و موجب می شود که موتور در جهت گردش میدان به حرکت در آید. این نوع از موتور
با نام موتور القایی معروف است. برای اینکه این موتور به حرکت درآید بایستی همواره
موتور با سرعتی کمتر از فرکانس منبع تغذیه اعمالی به موتور، بچرخد چرا که در غیر
این صورت میدان متعادل کنندهای در روتور ایجاد نخواهد شد. استفاده از این نوع
موتور در کاربردهای ترکشن نظیر لوکوموتیوها، که در آن به موتور ترکشن آسنکرون
معروف است، روز به روز در حال افزایش است. به سیم پیچ های روتور جریان میدان جدایی
اعمال می شود تا یک میدان مغناطیسی پیوسته ایجاد شود، که در موتور سنکرون وجود
دارد، موتور به صورت همزمان با میدان مغناطیسی دوار ناشی از برق AC سه فاز، به گردش در می آید. موتورهای سنکرون را می توانیم به
عنوان مولد جریان هم بکار برد. موتورهای پله ای نوع دیگری از موتورهای
الکتریکی موتور پله ای است، که در آن یک روتور درونی، شامل آهنرباهای دائمی توسط
یک دسته از آهنرباهای خارجی که به صورت الکترونیکی روشن و خاموش می شوند ، کنترل
می شود. یک موتور پله ای ترکیبی از یک موتور الکتریکی DC و یک سلونویید است. موتورهای پله ای ساده توسط بخشی از یک سیستم
دنده ای در حالت های موقعیتی معینی قرار می گیرند، اما موتورهای پله ای نسبتا
کنترل شده، می توانند بسیار آرام بچرخند. موتورهای پله ای کنترل شده با کامپیوتر
یکی از فرمهای سیستم های تنظیم موقعیت است، بویژه وقتی که بخشی از یک سیستم
دیجیتال دارای کنترل فرمان یار باشند. موتورهای خطی یک موتور خطی اساساً یک
موتور الکتریکی است که از حالت دوار در آمده تا بجای اینکه یک گشتاور (چرخش) گردشی
تولید کند، یک نیروی خطی توسط ایجاد یک میدان الکترومغناطیسی سیار در طولش، بوجود
آورد. موتورهای خطی اغلب موتورهای القایی یا پله ای اند. می توانید یک موتور خطی
را در یک قطار سریع السیر ماگلیو مشاهده کنید که در آن قطار روی زمین پرواز می
کند. اساس موتورهای القایی AC امروزه در صنعت،
ماشینهای متفاوت و با سرعت های مختلف مورد استفاده قرار می گیرد که موارد قابل ذکر
عبارتند از : ماشین برش فلزات ، چرثقیل الکتریکی ، ماشینهای مربوط به حمل ونقل
وانواع مختلف وسایل چاپ ، معدن ذغال سنگ و صنایع دیگر . برای مثال چرخاننده
الکتریکی در ماشین برش فلزات ، سرعت سیستم می باید مطابق با نوع کار ، فلز و کیفیت
نوع برش واندازه قطعه مورد نظر ، قابل تنظیم باشد . در کلیه ماشین آلات ذکر شده ،
چرخاننده باید مجهز به کنترل سرعت باشد تا بتواند کمیت تولید زیاد ، شرایط کار
مطلوب و کیفیت محصول خوب باشد . توسط کنترل سرعت می توان سرعت چرخاننده را به
میزان مورد نیاز جهت انجام مراحل کار تغییر داد . مفهوم کنترل سرعت یا تنظیم نبا
ید شامل تغییر طبیعی در هنگام اخذ بار شود . تغییر سرعت مورد نیاز در روی موتور
چرخاننده و یا عنصر مرتبط به موتور چرخاننده انجام می گیرد ، که ممکن است این عمل
با دست توسط اپراتور و یا به طور اتوماتیک توسط وسایل کنترل انجام گیرد . امروزه
تنظیم سرعت توسط مدار الکتریکی توسعه یافته و از نظر اقتصادی و نتایج حاصله بر
کنترل مکانیکی ارجحیت دارد . اصل ساخت اولیه و کاربری مانند بیشتر موتورها ,
یک موتورهای القایی AC یک
قسمت ثابت بیرونی به نام استاتور و یک روتور که در درون آن می چرخد دارند , که
میان آندو یک فاصله دقیق کارشناسی شده وجود دارد.به طور مجازی همه موتورهای
الکتریکی از میدان مغناطیسی دوار برای گرداندن روتورشان استفاده می کنند.یک موتور
سه فاز القایی AC تنها نوعی است که در
آن میدان مغناطیسی دوار به طور طبیعی بوسیله استاتور به خاطر طبیعت تغذیه گر آن
تولید می شود.در حالی که موتورهای DC به
وسیله ای الکتریکی یا مکانیکی برای تولید این میدان دوار نیاز دارند.یک موتور
القایی AC تک فاز نیازمند یک
وسیله الکتریکی خارجی برای تولید این میدان مغناطیسی چرخشی است. موتورهای AC : موتورهای AC تک فاز: معمولترین موتور تک فاز
موتور سنکرون قطب چاکدار است، که اغلب در دستگاه هایی بکار می رود که گشتاور پایین
نیاز دارند، نظیر پنکههای برقی ، اجاقهای ماکروویو و دیگر لوازم خانگی کوچک. نوع
دیگر موتور AC تک فاز موتور القایی
است، که اغلب در لوازم بزرگ نظیر ماشین لباسشویی و خشک کن لباس بکار میرود.
عموماً این موتورها میتوانند گشتاور راه اندازی بزرگتری را با استفاده از یک سیم
پیچ راه انداز به همراه یک خازن راه انداز و یک کلید گریز از مرکز ، ایجاد کنند. موتورهای AC سه فاز: برای کاربردهای نیازمند
به توان بالاتر، از موتورهای القایی سه فاز AC (یا چند فاز) استفاده میشود. این موتورها از اختلاف فاز موجود
بین فازهای تغذیه چند فاز الکتریکی برای ایجاد یک میدان الکترومغناطیسی دوار
درونشان ، استفاده میکنند. اغلب ، روتور شامل تعدادی هادیهای مسی است که در فولاد
قرار داده شدهاند. از طریق القای الکترومغناطیسی میدان مغناطیسی دوار در این
هادیها القای جریان میکند، که در نتیجه منجر به ایجاد یک میدان مغناطیسی متعادل
کننده شده و موجب میشود که موتور در جهت گردش میدان به حرکت در آید. موتورهای پلهای : نوع دیگری از موتورهای
الکتریکی موتور پلهای است، که در آن یک روتور درونی ، شامل آهنرباهای دائمی توسط
یک دسته از آهنرباهای خارجی که به صورت الکترونیکی روشن و خاموش میشوند، کنترل میشود.
یک موتور پلهای ترکیبی از یک موتور الکتریکی DC و یک سلونوئید است. موتورهای پلهای ساده توسط بخشی از یک سیستم
دندهای در حالتهای موقعیتی معینی قرار میگیرند، اما موتورهای پلهای نسبتا کنترل
شده ، میتوانند بسیار آرام بچرخند. موتورهای پلهای کنترل شده با کامپیوتر یکی موتورهای خطی : یک موتور خطی اساساً یک
موتور الکتریکی است که از حالت دوار در آمده تا بجای اینکه یک گشتاور (چرخش) گردشی
تولید کند، یک نیروی خطی توسط ایجاد یک میدان الکترومغناطیسی سیار در طولش ، بوجود
آورد. موتورهای خطی اغلب موتورهای القایی یا پلهای هستند. میتوانید یک موتور خطی
را در یک قطار سریع السیر ماگلیو مشاهده کنید که در آن قطار روی زمین پرواز میکند. AC فاز شکسته موتور فاز شکسته همچنین
به عنوان Induction start/Induction run (استارت القایی/کارکرد القایی)هم شناخته می شود که دو پیچه
دارد.پیچه استارت از سیم نازکتر و تعداد دور کمتر نسبت به پیچه اصلی برای بوجود
آوردن مقاومت بیشتر ساخته شده است.همچنین میدان پیچه استارت در زاویه ای غیر از
آنچه که پیچه اصلی دارد قرار می گیرد که سبب آغاز چرخش موتور می شود.پیچه اصلی که
از سیم ضخیم تری ساخته شده است موتور را همیشه درحالت چرخش باقی نگه می دارد. AC القایی با خازن دائمی اسپلیت این موتور (PSC) نوعی خازن دائما متصل به صورت سری به پیچه استارت دارد.این کار
سبب آن میشود که پیچه استارت تازمانی که موتور به سرعت چرخش خود برسد بصورت پیچه
ای کمکی عمل کند.از آنجا که خازن عملکرد اصلی , باید برای استفاده مداوم طراحی شده
باشد , نمیتواند توان استارتی معادل یک موتور استارت خازنی ایجاد نماید.گشتاور
استارت یک موتور (PSC) معمولا کم و در حدود
30 تا 150 درصد گشتاور ارزیابی شده است.موتورهای (PSC) جریان استارتی پایین , معمولا در کمتر از 200 درصد جریان برآورد
شده دارند که آنها را برای کاربریهایی با سرعتهای دارای چرخه های خاموش روشن بالا
بسیار مناسب میسازد. موتورهای PSC
امتیازات فراوانی دارند.طراحی موتور براحتی برای استفاده با کنترل کننده های سرعت
میتواند اصلاح شود.همچنین می توانند برای بازدهی بهینه و ضریب توان بالا در فشار
برآورد شده طراحی شوند.آنها به عنوان قابل اطمینان ترین موتور تک فاز مطرح
میشوند.مخصوصا به این خاطر که به سوئیچ گریز از مرکز نیازی ندارند. موتورهای AC القایی استارت با خازن/ کارکرد با خازن این موتور , همانند
موتور با استارت خازن , خازنی از نوع استارتی در حالت سری با پیچه کمکی برای
گشتاور زیاد استارت دارد.همچنین مانند یک موتور PSC خازنی از نوع کارکرد که درکنار خازن استارت در حالت سری با پیچه
کمکی است که بعد از شروع به کار موتور از مدار خارج می شود.این حالت سبب بوجود
آمدن گشتاوری در حد اضافی می شود. AC با قطب سایه دار موتورهای با قطب سایه
دار فقط یک پیچه اصلی دارند و پیچه استارت ندارند.استارت خوردن بوسیله طرح خاص آن
که حلقه پیوسته مسی ای را دور قسمت کوچکی از هر قطب موتور حلقه می کند انجام می
شود.این سایه که قطب را دو تکه می کند سبب می شود که میدان مغناطیسی ای ضعیفتر در
ناحیه سایه خورده نسبت به قسمت دیگر و در کنار آن بوجود آید.تعامل میان میدانها
محور را به چرخش وامی دارد. آشنایی با استپ موتور با پیشرفت روز افزون
علم و فناوری همواره نیاز های جدید به وسایل و دستگاه های جدید تر جهت هماهنگی همه
بخشهای صنعت با این پیشرفت ، به وجود می آیند. بدین منظور شناخت و طراحی راه کارها
و وسایل جدید امری است اجتناب ناپذیر.از جمله این پیشرفت ها ساخت نوع جدید و
پیشرفته تری از موتورهای الکتریکی به نام استپ موتور ها یا موتورهای پله ای است که
با کاهش انواع هزینه ها در صناع کم کم جای مکانیزم های پیچیده مکانیکی را خواهند
گرفت.در این مقاله سعی شده است تا بسیار مختصر و متناسب با محدودیت ها بزبانی ساده
و قابل درک ساختار و نحوه کارکرد و کنترل موتورهای استپی بررسی و بیان شود. استپ موتور یا موتور پله ای یک استپ موتور وسیله ای
الکتریکی است چرخش زاویه ای گسسته یا پله ای دارد و با اتصال به ضربان هایی در
فرکانسی خاص کار می کند. هر ضربان فرستاده شده به موتور سبب حرکت محور موتور تا
زاویه ای معین می شود که این زاویه ، زاویه استپینگ (Stepping Angle) نامیده می شود. روتور از جنس آهنربای
دائمی است و شش دندانه دارد که با فاصله های مساوی و یک در میان در قطب های N و S
اطراف روتور قرار دارند.استاتور چهار قطب دارد که هر قطب دارای پیچه ای است که این
پیچه از مرکز خروجی V را
داراست. اگر توالی این القا ها
معکوس شود ، جهت حرکت نیز معکوس می شود. اگر حتی همه القا ها
متوقف شده و هیچ جریانی به موتور وارد نشود ، به علت وجود آهنرباهای دائمی در
روتور بازهم مقداری جاذبه میان قطب ها و دندانه ها وجود دارد. از این رو حتی
هنگامی هم که هیچ تغذیه ای به موتور متصل نیست ، بازهم قدری ((گشتاور نگه دارنده))
در موتور باقی می ماند. استپ موتوری که در بالا شرح داده شد از دو پیچه
با در مقابل هم قرار دادن مگنت های همنام در هر قطب استفاده می کند. به این دلیل
است که این نوع ، استپ موتور "Bifilar"
نامیده می شود. الکترو موتور وعیب یابی
آن موتور های الکتریکی
(آسنکرون-یونیورسال-قطب چاکدار ) عیب یابی ورفع عیب موتور های مذکور . شناسایی سیم پیچ های اصلی وکمکی : 1- سیم پیچ های اصلی در
زیر شیار ها و سیم پیچ کمکی در رو قرار دارند. عیب یابی قطعات برقی : عیب1- موتور
اصلا"روشن نشده و جریانی از مدار عبور نمی کند. عیب یابی قطعات مکانیکی. عیب 1 - محور موتور چه
در حالت روشن وچه در حالت خاموشی به سختی حرکت می کند. عیب یابی موتور های یونیور سال : عیب 1 - موتور روشن نمی
شود. روشهای مختلف راه اندازی موتورهای آسنکرون موتورهای آسنکرون با
توجه به قدرت و ولتاژ آن به طرق مختلف راه اندازی میشوند و با توجه به اینکه موتور
در لحظه شروع به کار جریان زیادی میکشد و این جریان زیاد علاوه بر اینکه به خود
موتور صدمه میزند به مصرف کننده های دیگری که از این خط تغذیه می کنند لطمه زده و
کار آنها را مختل می سازد. پیدا کردن سرسیم های موتور آسنکرون UVW-XYZ آیا می دانید اگر موتور
آسنکرونی سه فازی داشته باشیم و 6 سر سیم ، که سر سیم های آن مشخص نیست ، چه باید
کرد ؟؟ تعیین آرایش کلافها در شیار : موتورهای سه فاز از سه
سیم پیچ تشکیل شده که هر کدام از این سیم پیچها 3/1 شیارهای استاتور را اشغال می
کند. این سیم پیچها به فاز اول (R) ،
فاز دوم (S) ، فاز سوم (T) شناسایی می شوند. برای یافتن سر سیم ها : ابتدا باید دو سر هر
کلاف را پیدا کنید از مولتی متر یا هر روش دیگری که می شناسید .( یک سر مولتی متر
را به یک سر سیم گرفته ، سر دیگر مولتی متر را با 5 سر سیم باقی مانده امتحان می
کنید . هر کدام که راه داد ، آن یک کلاف سیم پیچ است . ) اشتباه در سرسیم ها : همانطور که می دانیم
موتور سه فاز از سه سیم پیچ تشکیل شده است.که هر کدام از سیم پیچها 3/1 شیارهای
استاتور را اشغال کرده وباعث تشکیل قطب در موتور می شود و قطب ها حرکت دورانی به
روتورمی دهد . حال اگر سر سیمی تغییر کند در موتور ایجاد قطب نمی شود و موتور حرکت
نمی کند و می تواند باعث سوختن موتور شود . تنظیم دور موتورهای آسنکرون با دانستن رابطهNr=[60f/p](1-S) دور موتور آسنکرون را میتوان به طریقه های زیر تنظیم نمود : موتور آسنکرون با روتور سیم پیچی شده (روتور
رینگی) روتور سیم پیچی شده :
به جای میله ، استاتور را می توان سیم پیچی سه فاز کرد و اینسیم پیچها را به صورت
ستاره وصل می کنیم . درروی محور این موتور سه حلقه که نسبت به هم و نسبت به محور
عایق هستند (رینگ) قرار دارد . سه سر سیم پیچی روتور به این سه حلقه متصل می شود و
به وسیله جاروبکهائی که روی حلقه ها تکیه دارند به یک مقاومت سه فاز ستاره متصل
میشود. مزایای موتور آسنکرون با روتور سیم پیچی شده : در موقع شروع§ به کار گشتاور قوی
دارد . معایب موتورهای آسنکرون با روتور سیم پیچی شده : در مقابل§ تغییر ولتاژ حساسیت
دارد . موارد استفاده و کاربرد موتورهای آسنکرونبا
روتور سیم پیچی شده : از موتور آسنکرون با
روتور سیم پیچی شده :برای قدرت های خیلی زیاد مخصوصاً اگر با فشار قوی باشد
استفاده می شود و یا اینکه در موقع شروع به کار ، موتور احتیاج به گشتاور زیاد
داشته باشد مانند به راه انداختن ترن یا جرثقیلها و غیره راه اندازی موتورهای سنکرون در حالت بارداری ساختمان : استاتور
موتورهای سنکرون از نظر ساختمان دقیقاً مشابه استاتور موتورهای القایی است سیم
پیچهای سه فاز آن در داخل شیارهای هسته آهنی استاتور تعبیه شده که وظیفه آنها
ایجاد میدان دوار در هسته استاتور است. روشهای راه اندازی موتورهای سنکرون: برای راه اندازی موتورهای
سنکرون سه روش اساسی می توان به کار برد. تکنولوژی ساخت موتور های پله آیا تا کنون به واژه motion (حرکت) فکر کرده اید. امروزه اهمیت جابه جایی در کلیه زمینه ها
احساس می شود. حرکت و سرعت تعریف جدیدی را از جهان امروز ارائه می دهد. انواع stepper motor ها : variable reluctance موتور استارترها همانطوری که می دانید ،
راه اندازی موتورهای القایی در صنعت از اهمیت ویژه ای برخوردار است. به خصوص این
که امروزه استفاده از راه اندازهای الکترونیکی مانند راه اندازهای نرم - کنترلر
های سرعت بسیار مرسوم شده است و لازم است علاقه مندان و کارشناسان این رشته روشهای
کنترل و راه اندازی موتورها را به شیوه های کلاسیک به دیده فراموشی بسپارند و به
فراگیری روشهای بروز بپردازند. موتور های خطی یک موتور خطی در واقع
یک موتور الکتریکی است که استاتورش غیر استوانه شده است تا به جای اینکه یک گشتاور
چرخشی تولید کند، یک نیروی خطی در راستای طول استاتور ایجاد کند. شتاب پایین ایده موتور خطی اولین
بار توسط پرفسور اریک لیتویت از کالج امپریال در لندن مطرح شد. در طرح وی و در
اکثر طرحهای شتاب پایین، نیرو توسط یک میدان مغناطیسی خطی سیار که بر روی هادیها
موجود در میدان عمل میکند، ایجاد خواهد شد. در هر هادی چه یک حلقه، چه یک سیمپیچ
یا یک تکه از فلز تخت که در این میدان قرار گیرد جریانهای گردابی القا شده وجود
خواهد داشت و بنابراین یک میدان مغناطیسی مخالف را ایجاد خواهد کرد. دو میدان
مغناطیسی همدیگر را دفع خواهند کرد و بنابراین جسم هادی را از استاتور دور خواهند
کرد و آن را در طول جهت میدان مغناطیسی سیار حمل خواهند کرد. شتاب بالا موتورهای خطی شتاب بالا
برای کاربرهای متعددی پیشنهاد شدهاند. به علت اینکه مهمات ضد زرهی کنونی بایستی
گلولههای کوچکی با انرژی جنبشی بسیار بالا باشند یعنی دقیقاً آنچه که این موتورها
فراهم میکنند، از آنها به عنوان تسلیحات استفاده شده است. این موتورها همچنین
برای استفاده در پیشرانه فضا پیماها به کار گرفته میشود. در چنین شرایطی به این
موتورها راهاندازهای جرمی گفته میشود. سادهترین روش استفاده از راهانداز جرمی
برای پیشرانه فضا پیما، ساخت یک راهانداز جرمی بزرگ است که بتواند محموله را تا
سرعت گریز شتاب دهد. موتورهای فرمان یار DC بدون جاروبک یک سرو موتور، یا یک
موتورDC یا AC یا یک موتور DC
بدون جاروبک میباشد که ترکیب شده با یک دستگاه تعیین محل موقعیت (کدبردار
دیجیتالی). سروو موتورها در رباتها کاربرد خیلی زیادی دارند. این موتورها کوچک
ولی نسبت به اندازهشان بسیار پرقدرت میباشند. موتور DC بدون جاروبک یک موتورDC معمولی نیست، اما یک ماشین سنکرون آهنربای دائم است. این نام بردن
واقعی است زیرا مشخصات عملیاتی آن همانند همان موتورهای DC شنت با جریان میدان ثابت است. موتورهای پلهای نوع خاصی از موتور
سنکرون که برای چرخیدن محور به اندازه یک زاویه خاص برای همه پالسهای الکتریکی که
از واحد کنترل کننده خودش دریافت میکند، در نظر گرفته شده است. نوعی از پلهها
5/7 یا 15 درجه در هر پالس محور را میچرخانند. این است یک موتور که میتواند با
دو دستورالعمل بچرخد، حرکت کند در زاویههایی با فواصل کوچک و دقیق،گشتاور موجود
در سرعت صفر را تحمل میکند و با مدار دیجیتالی کنترل میشود. حرکت میکند در
زاویههای دقیق با فواصل کوچک معلوم به عنوان گام، در پاسخ به استفاده از پالسهای
دیجیتالی به مدار راهانداز الکتریکی. به طور کلی، این قبیل موتورها با گامهایی
در هر دور ساخته میشوند. گامهای موتورها دو قطبی هستند که نیاز به دو منبع قدرت
دارند با تک قطبی هستند که تنها نیاز به یک منبع قدرت دارند. موتورهای یونیورسال موتورهای یونیورسال
موتورهای چرخشی هستند شبیه به موتورهای DC اما طراحی شدهاند برای ولتاژ DC با AC
تکفاز. سیمپیچیهای استاتور و رتور این موتورها به صورت سری بین کموتاتور رتور
متصل شدهاند. بنابراین موتورهای یونیورسال همچنین معروف هستند به موتورهای AC سری یا یک موتور با کموتاتور AC. موتورهای یونیورسال میتوانند کنترل شوند با راهانداز زاویه فاز
و یا راهاندازهای برشگر. نمونه کاربرد در جاروبرقی، دریل و وسایل
آشپزخانه چندین نوع موتور القایی
تک فازکه امروزه مورد استفاده قرار میگیرد، وجود دارد. به طور اساسی آنها یکسان
هستند مگر برای وسایل راهاندازی. آنها طبقهبندی میشوند به : موتورهای القایی
با انشقاق فاز، موتور با استارت خازنی. موتور القایی AC فاز شکسته موتور فاز شکسته همچنین
به عنوان Induction
start/Induction run
(استارت القایی/کارکرد القایی)هم شناخته می شود که دو پیچه دارد.پیچه استارت از
سیم نازکتر و تعداد دور کمتر نسبت به پیچه اصلی برای بوجود آوردن مقاومت بیشتر
ساخته شده است.همچنین میدان پیچه استارت در زاویه ای غیر از آنچه که پیچه اصلی
دارد قرار می گیرد که سبب آغاز چرخش موتور می شود.پیچه اصلی که از سیم ضخیم تری
ساخته شده است موتور را همیشه درحالت چرخش باقی نگه می دارد. موتور القایی با استارت خازنی این نوع , موتور اصلاح
شده فاز شکسته با خازنی سری با آن برای بهبود استارت است.همانند موتور معمولی فاز
شکسته این نوع موتور یک سوئیچ گریز از مرکز داشته که هنگامی که موتور به 75 درصد
سرعت ارزیابی شده می رسد , پیچه استارت را از مدار خارج می نماید.از آنجا که خازن
با مدار استارت موازی است , گشتاور استارت بیشتری تولید می کند , معمولا در حدود
200 تا 400 درصد گشتاور ارزیابی شده.و جریان استارت معمولا بین 450 تا 575 درصد
جریان ارزیابی شده است.که بسیار کمتر از موتور فاز شکسته و بعلت سیم ضخیمتر در
مدار استارت است. موتورهای AC القایی با خازن دائمی اسپلیت این موتور (PSC) نوعی خازن دائما متصل به صورت سری به پیچه استارت دارد.این کار
سبب آن میشود که پیچه استارت تازمانی که موتور به سرعت چرخش خود برسد بصورت پیچه
ای کمکی عمل کند.از آنجا که خازن عملکرد اصلی , باید برای استفاده مداوم طراحی شده
باشد , نمیتواند توان استارتی معادل یک موتور استارت خازنی ایجاد نماید.گشتاور
استارت یک موتور (PSC) معمولا کم و در حدود
30 تا 150 درصد گشتاور ارزیابی شده است.موتورهای (PSC) جریان استارتی پایین , معمولا در کمتر از 200 درصد جریان برآورد
شده دارند که آنها را برای کاربریهایی با سرعتهای دارای چرخه های خاموش روشن بالا
بسیار مناسب می سازد. موتورهای AC القایی استارت با خازن/ کارکرد با خازن این موتور , همانند موتور با استارت خازن , خازنی از نوع استارتی
در حالت سری با پیچه کمکی برای گشتاور زیاد استارت دارد.همچنین مانند یک موتور PSC
خازنی از نوع کارکرد که درکنار خازن استارت در حالت سری با پیچه کمکی است که بعد
از شروع به کار موتور از مدار خارج می شود.این حالت سبب بوجود آمدن گشتاوری در حد
اضافی می شود.
موتور کلاسیک DC دارای آرمیچری از
آهنربای الکتریکی است. یک سوییچ گردشی به نام کموتاتور جهت جریان الکتریکی را در
هر سیکل دو بار برعکس می کند تا در آرمیچر جریان یابد و آهنرباهای الکتریکی،
آهنربای دائمی را در بیرون موتور جذب و دفع کنند. سرعت موتور DC به مجموعه ای از ولتاژ و جریان عبوری از سیم پیچهای موتور و بار
موتور یا گشتاور ترمزی، بستگی دارد. سرعت موتور DC وابسته به ولتاژ و گشتاور آن وابسته به جریان است. معمولاً سرعت
توسط ولتاژ متغیر یا عبور جریان و با استفاده از تپ ها (نوعی کلید تغییر دهنده
وضعیت سیم پیچ) در سیم پیچی موتور یا با داشتن یک منبع ولتاژ متغیر، کنترل می شود.
بدلیل اینکه این نوع از موتور می تواند در سرعتهای پایین گشتاوری زیاد ایجاد کند،
معمولاً از آن در کاربردهای ترکشن (کششی) نظیر لکوموتیوها استفاده می کنند.
اما به هرحال در طراحی کلاسیک محدودیتهای متعددی وجود دارد که بسیاری از این
محدودیت ها ناشی از نیاز به جاروبک هایی برای اتصال به کموتاتور است. سایش جاروبک
ها و کموتاتور، ایجاد اصطکاک می کند و هرچه که سرعت موتور بالاتر باشد، جاروبک ها
می بایست محکم تر فشار داده شوند تا اتصال خوبی را برقرار کنند. نه تنها این اصطکاک
منجر به سر و صدای موتور می شود بلکه این امر یک محدودیت بالاتری را روی سرعت
ایجاد می کند و به این معنی است که جاروبک ها نهایتاً از بین رفته نیاز به تعویض
پیدا می کنند. اتصال ناقص الکتریکی نیز تولید نویز الکتریکی در مدار متصل می کند.
این مشکلات با جابجا کردن درون موتور با بیرون آن از بین می روند، با قرار دادن
آهنرباهای دائم در داخل و سیم پیچ ها در بیرون به یک طراحی بدون جاروبک می رسیم.
نوع دیگر موتور AC تک فاز موتور القایی
است، که اغلب در لوازم بزرگ نظیر ماشین لباسشویی و خشک کن لباس بکار می رود.
عموماً این موتورها می توانند گشتاور راه اندازی بزرگتری را با استفاده از یک سیم
پیچ راه انداز به همراه یک خازن راه انداز و یک کلید گریز از مرکز، ایجاد کنند.
هنگام راه انداز ی، خازن و سیم پیچ راه انداز ی از طریق یک دسته از کنتاکت های تحت
فشار فنر روی کلید گریز از مرکز دوار، به منبع برق متصل می شوند . خازن به افزایش
گشتاور راه انداز ی موتور کمک می کند. هنگامی که موتور به سرعت نامی رسید، کلید
گریز از مرکز فعال شده، دسته کنتاکت ها فعال می شود، خازن و سیم پیچ راه انداز سری
شده را از منبع برق جدا می سازد. در این هنگام موتور تنها با سیم پیچ اصلی عمل می
کند.
سرعت موتور AC در ابتدا به فرکانس
تغذیه بستگی دارد و مقدار لغزش، یا اختلاف در سرعت چرخش بین روتور و میدان
استاتور، گشتاور تولیدی موتور را تعیین می کند. تغییر سرعت در این نوع از موتورها
را میتوان با داشتن دسته سیم پیچ ها یا قطب هایی در موتور که با روشن و خاموش
کردنشان سرعت میدان دوار مغناطیسی تغییر می کند، ممکن ساخت. به هر حال با پیشرفت
الکترونیک قدرت می توانیم با تغییر دادن فرکانس منبع تغذیه، کنترل یکنواخت تری بر
روی سرعت موتورها داشته باشیم.
موتورهای آسنکرون سه فاز به خاطر امتیازات چشمگیرشان در صنایع کاربرد متنوعی دارند
. از آن جمله در سیستمهای محرکه ای که نیاز به تغییر وتنظیم دور دارند بیشتر
وبیشتر بکار گرفته می شوند .
دور موتور آسنکرون به خودی خود حداکثر 1- min 3000 (برایP=1 ،F=50 HZ ) است . اما صنعت اتوماسیون و تنظیم دقیق ، نیاز به دورهایی از
حدود1 تاmin -1 100000 و بیشتر ( مثلا min -1 350000 در دندانپزشکی با بلبرینگ مغناطیسی ) می باشد . برخی سیستمهای
محرکه نظیر جراثقال به دور کمی نیازمنداند. دور موتور آسنکرون وابسته از F فرکانس شبکه ، P
تعداد زوج قطب موتور و S
لغزش آن می باشد :
Nr = (1- S) NS = ( 1-S )
توسط تغییرات این سه عامل می توان دور موتور آسنکرون را تغییر داد . برای این
منظور مدارهای متنوعی را می توان تحقق بخشید . در این میان سعی برآنست مدارهائی
مورد استفاده قرار گیرند که با هزینه کمتری تحقق پذیرند ، ساده ترند و نیز
تلفاتشان کمتر است. بدین ترتیب تعداد این مدارها عملاً محدود می گردد در ادامه
متدهای کلاسیک ومدرن تنظیم دور موتور آسنکرون را مورد بحث قرار خواهیم داد .
موتورهای القایی AC عمومی ترین موتورهایی
هستند که در سامانه های کنترل حرکت صنعتی و همچنین خانگی استفاده می شوند.طراحی
ساده و مستحکم , قیمت ارزان , هزینه نگه داری پایین و اتصال آسان و کامل به یک
منبع نیروی AC امتیازات اصلی
موتورهای القایی AC هستند.انواع متنوعی از
موتورهای القایی AC در بازار موجود
است.موتورهای مختلف برای کارهای مختلفی مناسب اند.با اینکه طراحی موتورهای القایی AC آسانتر از موتورهای DC است , ولی کنترل سرعت و گشتاور در انواع مختلف موتورهای القایی AC نیازمند درکی عمیقتر در طراحی و مشخصات در این نوع موتورهاست.
این نکته در اساس انواع مختلف , مشخصات آنها , انتخاب شرایط برای کاربریهای مختلف
و روشهای کنترل مرکزی یک موتورهای القایی AC را مورد بحث قرار می دهد.
در درون هر موتور دو سری آهنربای مغناطیسی تعبیه شده است.در یک موتور القایی AC یک سری از مغناطیس شونده ها به خاطراینکه تغذیه AC به پیچه های استاتور متصل است در استاتور تعبیه شده اند.بخاطر
طبیعت متناوب تغذیه ولتاژ AC بر
اساس قانون لنز نیرویی الکترومغناطیسی به روتور وارد می شود (درست شبیه ولتاژی که
در ثانویه ترانسفورماتور القا می شود).بنابر این سری دیگر از مغناطیس شونده ها
خاصیت مغناطیسی پیدا می کنند.-نام موتور القایی از اینجاست-.تعامل میان این مگنت
ها انرژی چرخیدن یا تورک (گشتاور) را فراهم می آورد.در نتیجه موتور در جهت گشتاو
بوجود آمده چرخش می کند.
استاتور از چندین قطعه باریک آلومنیوم یا آهن سبک ساخته شده است.این قطعات بصورت
یک سیلندر تو خالی به هم منگنه و محکم شده اند(هسته استاتور) با شیارهایی
که در شکا یک نشان داده شده اند.سیم پیچهایی از سیم روکش دار در این شیارها جاسازی
شده اند.هر گروه پیچه با هسته ای که آن را فرا گرفته یک آهنربای مغناطیسی (با دو
پل) را برای کار کردن با تغذیه AC شکل می دهد.تعداد قطبهای یک موتور القایی AC به اتصال درونی پیچه های استاتوربستگی دارد.پیچه های استاتور
مستقیما به منبع انرژی متصل اند.آنها به صورتی متصل اند که با برقراری تغذیه AC یک میدان مغناطیسی چرخنده تولید می شود.
روتور از چندین قطعه مجزای باریک فولادی که میانشان میله هایی از مس یا آلومنیوم
تعبیه شده ساخته شده است.در رایج ترین نوع روتور (روتور قفس سنجابی) این میله ها
در انتهای خود به صورت الکتریکی و مکانیکی بوسیله حلقه هایی به هم متصل شده
اند.تقریبا 90 درصد از موتورهای القایی دارای روتور قفس سنجابی می باشند و این به
خاطر آن است که این نوع روتور ساختی مستحکم و ساده دارد.این روتور از هسته ای چند
تکه استوانه ای با محوری که شکافهای موازی برای جادادن رساناها درون آن دارد تشکیل
شده است.هر شکاف یک میله مسی یا آلومنیومی یا آلیاژی را شامل می شود.در این میله
ها به طور دائمی بوسیله حلقه های انتهایی آنها مدار کوتاه برقرار است.چون این نوع
مونتاژ درست شبیه قفس سنجاب است , این نام برای آن انتخاب شده است.میله ای روتور
دقیقا با محور موازی نیستند.در عوض به دو دلیل مهم قدری اریب نصب می شوند.
دلیل اول آنکه موتور با کاهش صوت مغناطیسی بدون صدا کارکرده و برای آنکه از
هارمونیکها در شکافها کاسته شود.
دلیل دوم آن است که گرایش روتور به هنگ کردن کمتر شود.دندانه های روتور به خاطر
جذب مغناطیسی مستقیم (محض) تلاش می کنند که در مقابل دندانه های استاتور باقی
بمانند.این اتفاق هنگامی می افتد که تعداد دندانه های روتور و استاتور برابر
باشند.
روتور بوسیله مهار هایی در دو انتها روی محور نصب شده ; یک انتهای محور در حالت
طبیعی برای انتقال نیرو بلندتر از طرف دیگر گرفته می شود.ممکن است بعضی موتورها
محوری فرعی در طرف دیگر(غیر گردنده - غیر منتقل کننده نیرو) برای اتصال دستگاههای
حسگر حالت(وضعیت) و سرعت داشته باشند.بین استاتور و روتور شکافی هوایی موجود
است.بعلت القا انرژی از استاتور به روتور منتقل می شود.تورک تولید شده به روتور
نیرو داده و سپس برای چرخیدن به آن نیرو می کند.صرف نظر از روتور استفاده شده قواعد
کلی برای دوران یکی است.
میدان مغناطیسی ای که در استاتور تولید میشود با سرعت سنکرون می چرخد.(Ns)
در روتور میدان مغناطیسی تولید می شود زیرا به طور طبیعی ولتاژ متناوب است.
برای کاهش سرعت نسبی نسبت به (شار)استاتور , روتور چرخش را در همان جهتی که شار
استاتور دارد آغاز می کند و تلاش می کند تا به سرعت چرخش فلاکس نایل شود.با اینحال
روتور هرگز موفق نمی شود که به سرعت میدان استاتور برسد.روتور از سرعت میدان
استاتور کندتر می گردد.این سرعت Base speed نام
دارد.(Nb)
تفاوتها میان Ns و NbSlip نام دارد.اسلیپ مقادیر مختلف فشار(مکانیکی) بستگی دارد.هر افزایشی
در فشار موجب کندتر کار کردن روتور و افزایش اسلیپ می شود.برعکس کاهش فشار سبب
سرعت گرفتن روتور و کاهش اسلیپ می شود.اسلیپ بوسیله درصد نشان داده می شود.
عموما دسته بندی موتورهای القای براساس تعداد پیچه های استاتور است که عبارتند از:
موتورهای القایی تک فاز
موتورهای القایی سه فاز
هنگام راه اندازی ، خازن و سیم پیچ راه اندازی از طریق یک دسته از کنتاکتهای تحت
فشار فنر روی کلید گریز از مرکز دوار ، به منبع برق متصل میشوند. خازن به افزایش
گشتاور راه اندازی موتور کمک میکند. هنگامی که موتور به سرعت نامی رسید، کلید
گریز از مرکز فعال شده ، دسته کنتاکتها فعال میشود، خازن و سیم پیچ راه انداز سری
شده را از منبع برق جدا میسازد، در این هنگام موتور تنها با سیم پیچ اصلی عمل میکند
این نوع از موتور با نام موتور القایی معروف است. برای اینکه این موتور به حرکت
درآید بایستی همواره موتور با سرعتی کمتر از فرکانس منبع تغذیه اعمالی به موتور ،
بچرخد، چرا که در غیر این صورت میدان متعادل کنندههای در روتور ایجاد نخواهد شد.
استفاده از این نوع موتور در کاربردهای ترکشن نظیر لوکوموتیوها ، که در آن به
موتور ترکشن آسنکرون معروف است، روز به روز در حال افزایش است. به سیم پیچهای
روتور جریان میدان جدایی اعمال میشود تا یک میدان مغناطیسی پیوسته ایجاد شود، که
در موتور سنکرون وجود دارد، موتور به صورت همزمان با میدان مغناطیسی دوار ناشی از
برق AC سه فاز ، به گردش در
میآید. موتورهای سنکرون را میتوانیم به عنوان مولد جریان هم بکار برد.
سرعت موتور AC در ابتدا به فرکانس
تغذیه بستگی دارد و مقدار لغزش ، یا اختلاف در سرعت چرخش بین روتور و میدان
استاتور ، گشتاور تولیدی موتور را تعیین میکند. تغییر سرعت در این نوع از موتورها
را میتوان با داشتن دسته سیم پیچها یا قطبهایی در موتور که با روشن و خاموش
کردنشان سرعت میدان دوار مغناطیسی تغییر میکند، ممکن ساخت. به هر حال با پیشرفت
الکترونیک قدرت می توانیم با تغییر دادن فرکانس منبع تغذیه ، کنترل یکنواخت تری بر
روی سرعت موتورها داشته باشیم. روشهای کنترل سرعت در موتورهای القایی : همانطور که
در گذشته نیز گفته شد از معایب اصلی موتورهای آسنکرون نسبت به موتورهای DC در عدم امکانات مناسب در کنترل سرعت آنها می باشد که به همین دلیل
در صنعت که احتیاج به کنترل دور موتور با دقت زیاد و در رنج وسیعی می باشد استفاده
از ماشینهای DC ترجیح داده می شود و
این مسئله در هنگامی که گشتاور راه اندازی بزرگی نیز مورد احتیاج باشد ، تشدید می
گردد . به همین دلیل برای کنترل سرعت ماشینهای القایی نیز تمهیداتی انجام گرفته
است که توسط آنها بتوان تا حد امکان به کنترل سرعت این موتورها پرداخت0 به طور کلی
به چهار روش می توان به کنترل دور موتورهای القایی پرداخت که این موارد عبارتنداز
: 1-کنترل دور به وسیله کنترل ولتاژ 2-کنترل دور توسط کنترل فرکانس 3-کنترل دور به
وسیله کنترل ولتاژ و کنترل فرکانس به صورت همزمان 4-کنترل سرعت از طریق کنترل جفت
قطب در بین این روشها بهترین روش کنترل دوربه وسیله کنترل همزمان ولتاژ و فرکانس
می باشد چون مقدار فوران میدان مغناطیسی دوار موتورهای القایی متناسب با نسبت
ولتاژ به فرکانس می باشد بنا براین در صورتی که به همان نسبت که ولتاژ را تغییر می
دهیم مقدار فرکانس را نیز تغییر دهیم نتیجتاً مقدار دامنهی میدان مغناطیسی دوار
موتور تغییری نمینماید
و در نتیجه در کار ماشین اختلالی وجود نخواهد داشت. از طرف دیگر با تغییر مشخصات
منبع تغذیه منحنی گشتاور بر حسب سرعت تغییر خواهد نمود . عیب این روش در قیمت
بسیار بالای مبدلهایی می باشند که به صورت همزمان فرکانس و ولتاژ را کنترل می
نمایند و همچنین دارای ساختمان پیچیده ای هستند و تعمیر و نگهداری آنها مشکل می
باشد و بعضاّ هزینه های مربوط به این مبدّل ها از هزینه مربوط به خود موتور بیشتر
می گردد . بنابراین در بسیاری از مواقع از لحاظ اقتصادی استفاده از این روش برای
کنترل سرعت موتور القایی مقرون به صرفه نمی باشد.
از فرمهای سیستمهای تنظیم موقعیت است، بویژه وقتی که بخشی از یک سیستم دیجیتال
دارای کنترل فرمان یار باشند.
احتمالا بیشتر از کل انواع موتورها از موتورهای القایی AC تک فاز استفاده می شود.منطقی است که باید موتورهای دارای کمترین
گرانی و هزینه نگه داری بیشتر استفاده شود. موتور القایی AC تک فاز بهترین مصداق این توصیف است.آن طور که از نام آن برمیاید
این نوع از موتور تنها یک پیچه (پیچه اصلی) دارد و با یک منبع تغذیه تک فاز کار می
کند.در تمام موتورهای القایی تک فاز روتور از نوع قفس سنجابی است.
موتور القایی تک فاز خود راه انداز نیست.هنگامی که موتور به یک تغذیه تک فاز متصل
است پیچه اصلی دارای جریانی متناوب می شود.این جریان متناوب میدان مغناطیسی ای
ضربانی تولید می کند.بسبب القا روتور تحریک می شود.چون میدان مغناطیسی اصلی ضربانی
است تورکی که برای چرخش موتور لازم است بوجود نمی آید و سبب ارتعاش روتور و نه
چرخش آن می شود.از این رو موتور القایی تک فاز به دستگاه آغاز گری نیاز داردکه می
تواندضربات آغازی را برای چرخش موتور تولید کند.
دستگاه آغاز گر موتورهای القایی تک فاز اساسا پیچه ای اضافی در استاتور است (پیچه
کمکی) .پیچه استارت می تواند دارای خازنهای سری ویا سوئیچ گریز از مرکز
باشد.هنگامی که ولتاژ تغذیه برقرار است جریان در پیچه اصلی بسبب مقاومت پیچه اصلی
ولتاژتغذیه را افت میدهد (ولتاژ به جریان تبدیل می شود).در همین حین جریان در پیچه
استارت بسته به مقاومت دستگاه استارت به افزایش ولتاژ تغذیه تبدیل می شود.فعل و
انفعال میان میدانهای مغناطیسی که پیچه اصلی و دستگاه استارت می سازند میدان
برایندی میسازند که در جهتی گردش می کند.موتور گردش را در جهت این میدان برایند
آغاز میکند.
هنگامی که موتور به 75 درصد دور مجاز خود می رسد یک سوئیچ گریز از مرکز پیچه
استارت را از مدار خارج می کند.از این لحظه به بعد موتور تک فاز می تواند تورک
کافی را برای ادامه کارکرد خود نگه دارد.
بجز انواع خاص دارای Capacitor start / capacitor run عموماهمه موتورهای تک فاز فقط برای کاربری های بالای 3/4 hp استفاده می شوند.
بسته به انواع تکنیکهای استارت موتورهای القایی تک فاز AC در دسته بندی ای وسیع قرار دارند.
تورک آغازین کم است مثلا 100 تا 175 درصد تورک ارزیابی شده.موتور برای استارت
جریانی زیاد طلب می کند.تقریبا 700 تا 1000 درصد جریان ارزیابی شده.تورک بیشینه
تولید شده نیز در محدوده 250 تا 350 درصد از تورک براوردشده می باشد.
کاربریهای خوب برای موتورهای فاز شکسته شامل سمباده (آسیاب) های کوچک , دمنده ها و
فنهای کوچک و دیگر دستگاههایی با نیاز به تورک آغازین کم با و نیاز به قدرت 1/20
تا 1/3 اسب بخار می باشد.از استفاده از این موتورها در کاربریهایی که به دوره های
خاموش و روشن و گشتاور زیاد نیازدارند خود داری نمایید.
این نوع , موتور اصلاح شده فاز شکسته با خازنی سری با آن برای بهبود استارت
است.همانند موتور معمولی فاز شکسته این نوع موتور یک سوئیچ گریز از مرکز داشته که
هنگامی که موتور به 75 درصد سرعت ارزیابی شده می رسد , پیچه استارت را از مدار
خارج می نماید.از آنجا که خازن با مدار استارت موازی است , گشتاور استارت بیشتری
تولید می کند , معمولا در حدود 200 تا 400 درصد گشتاور ارزیابی شده.و جریان استارت
معمولا بین 450 تا 575 درصد جریان ارزیابی شده است.که بسیار کمتر از موتور فاز
شکسته و بعلت سیم ضخیمتر در مدار استارت است..
نوع اصلاح شده ای از موتو با استارت خازنی ، موتور با استارت مقاومتی است.در این
نوع موتور خازن استارت با یک مقاومت جایگزین شده است.موتور استارت مقاومتی در
کاربریهایی مورد استفاده قرار می گیرد که میزان گشتاور استارتینگی کمتر از مقداری
که موتور استارت خازنی تولید می کند لازم است.صرف نظر از هزینه این موتور امتیازات
عمده ای نسبت به موتور استارت خازنی ندارد.
این موتورها در انواع مختلف کاربریهای پولی و تسمه ای مانند تسمه نقاله های کوچک ,
پمپها و دمنده های بزرگ به خوبی بسیاری از خود گردانها و کاربریهای چرخ دنده ای
استفاده می شوند.
این نوع موتور می تواند ... و بازده بیشتر طراحی شود .این موتور بخاطر خازنهای
کارکرد و استارت و سوئیچ گریز از مرکز آن پرهزینه است.
این موتور می تواند در بسیاری از کاربریهایی که از هرموتور تک فاز دیگری انتظار
میرود استفاده شود.این کاربریها شامل ماشینهای مرتبط با چوب , کمپرسورهای هوا ,
پمپهای آب فشار قوی , پمپهای تخلیه و دیگر کاربردهای نیازمند گشتاورهای بالا در حد
1 تا 10 اسب بخار می شوند.
چون موتور با قطب سایه خورده پیچه استارت , سوئیچ استارت ویا خازن ندارد از نظر
الکتریکی ساده و ارزان است.همچنین سرعت آن راصرفا با تغییر ولتاژ یا بوسیله یک
پیچه با چند دور مختلف می توان کنترل کرد.
ساخت موتور با قطب سایه خورده از نظر مکانیکی اجازه تولید انبوه را میدهد.درحقیقت
این موتورها به موتورهای یک بار مصرف معروفند.بدین معنی که جایگزین کردن آنها
ارزانتر از تعمیر آنهاست.
موتورهای با قطب سایه دار بسیاری مشخصات مثبت دارند.اما چندین مورد بی فایدگی هم
دارند.گشتاور استارت کم آن معمولا 25 تا 75 درصد گشتاور برآوردی است.این موتور
موتوری با اتلاف بالاست که سرعتی حدود 7 تا 10 درصد سرعت سنکرون دارد.عموما بازده
این نوع موتور بسیار پایین است (زیر 20 درصد)
هزینه اولیه پایین آن را برای قدرت کمتر یا کاربردهای با کار کمتر مناسب می
سازد.شاید وسیعترین استفاده از آنها در فنهای چند سرعته برای استفاده خانگی
است.ولی گشتاور کم موتور دارای قطب سایه دار را برای بیشتر کاربریهای صنعتی یا
تجاری که در آنها کار مداوم یا چرخه های گردش بیشتر معمول است غیر قابل استفاده می
کند.
PSC بسته به طراحیشان
کاربری بسیار متنوعی دارند که شامل فنها , دمنده ها با نیاز به گشتاور استارت کم و
چرخه های کاری غیر دائمی مانند تنظیم دستگاهها (طرز کارها) , عملگر درگاهها و
بازکننده های درب گاراژها میشود.
با درک میدان های مغناطیسی و کشف آنکه می توان انرژی الکریکی را به انرژی مکانیکی
تبدیل نمود تحولی عظیم در تاریخ بشری بوجود آمد ، بگونه ای که بشر روز به روز به
تفکر و طراحی و ساخت وسایلی که بتوانند با استفاده از انرژی الکتریکی ، انرژی
مکانیکی تولید نمایند روی آورد. از این رو انواع موتور های الکتریکی به صحنه وجود
آمده و همچنان سیر تکمیلی خود را طی نمودند تا به امروز که می توان برای هر نوع
کاربری ، نوع خاصی از موتورها را بکار برد. اما ساخت اسپ موتور با امکاناتی که به
طراحان و سازندگان ماشین آلات میدهد ، به گونه ای برجسته سبب کاهش هزینه ها در همه
زمینه ها می شود. یکی از چندین مزایای بسیار زیاد این نوع الکتروموتورها تبدیل
مکانیزم های بسیار پیچیده مکانیکی ، به تنها یک محرک استپی می باشد. در ادامه با
این پدیده جالب آشنا تر خواهیم شد.
شکل 1 ساختمان ساده شده یک استپ موتور "Bifilar" مگنت دائمی را نشان می دهد.
پیچه های روی قطب های مختلف به هم وصلند بطوری که فقط پنج سیم A , B , C , D & +V از
موتور خارج می شوند.پیچه با ارسال جریان به سیم +V و خروج آن از یکی از سیمهای دیگر فعال می شود.
سیم پیچ ها در دندانه های استاتور به روشی پیچیده می شوند به طوریکه نتایج زیر
حاصل می شود :
اگر سیم B فعال باشد ، قطب 1
شمال و قطب 2 جنوب خواهند بود و اگر سیم A فعال باشد قطب 1 جنوب و قطب 2 شمالمیشود.
اگر سیم C فعال باشد قطب 3 شمال
و قطب 4
جنوب و اگر سیم D فعال باشد قطب 3 جنوب
و در عوض قطب 4 شمال خواهند بود.
عملکرد استپ موتورها براساس این قانون است که وقتی قطبهای مشابه دفع می شوند ،
قطبهای مخالف جذب می شوند. اگر سیم پیچ ها در توالی صحیح فعال باشند روتور در مسیر
و جهتی معین خواهد چرخید.
شکل 2 نشان می دهدکه روتور هنگامی که پیچه ها با توالی داده شده در جدول 1 فعال
اند چگونه می گردد.
همانطور که در شکل 2 مشاهده می شود ، ترتیب القاهای داده شده در در جدول 1 سبب
چرخش روتور در جهت عقربه های ساعت می شود.
از شکل 2 می توان مشاهده نمود که موتور زاویه استپینگ یا زاویه مرحله 30 درجه دارد
و برای کامل کردن یک چرخه به 12 استپ یا مرحله نیاز دارد. تعداد مرحله ها در هر
دور در یک موتور استپی با اضافه کردن دندانه های بیشتر روی روتور می تواند افزایش
یابد و با اضافه کردن دندانه هایی به دندانه های استاتور ، زاویه استپینگ یا زاویه
طی مرحله یک موتور استپی را می توان تا حد 1.8 درجه کوچک کرد به طوری که برای طی
یک چرخه دویست مرحله نیاز باشد.
برنامه القای پیچه ها در شکل 2 به القای تک فاز معروف است ; از آنجا که در هر زمان
فقط یکی از چهار پیچه فعال است.
در هر مرحله دندانه های روتور دقیقا رد مقابل دندانه های فعال استاتور قرار می
گیرند. با این حال راه اندازی موتور با دو پیچه حامل جریان در یک زمان امری ممکن
است (القای دو فازی). در این حالت دندانه های روتور خود را در میان دوتا از دندانه
های فعال استاتور قرار می دهند. جدول 2 برنامه کاری و موقعیت روتور را برای القای
دو فاز و تک فاز نشان می دهد.توجه داشته باشید که زاویه مرحله یا همان Stepping Angle برای دو نوع القا یکی است بجز اینکه موقعیت های روتور با نصف
زاویه مرحله تعیین می شوند.
اگر القای تک فاز و دو فاز با هم ترکیب شوند ، یک حالت نیم مرحله (Half Step mode) حاصل می شود. در این حالت تعداد مراحل یا استپ ها در هر چرخه دو
برابر است ; به طوری که اگر موتوری در حالت مرحله کامل یا Full – Step برای کامل کردن چرخه به دویست دور نیاز داشته باشد ، در حالت نیم
مرحله یا Half – Step به چهارصد دور برای
تکمیل آن نیاز دارد. جدول 3 توالی کارکرد برای حالت نیم مرحله نشان می دهد.

نتیجتا کارایی و امکانات یک استپ موتور بسیار بیشتر از انواع دیگر الکترو موتورها
می باشد. بدین لحاظ که بسیاری مکانیزم ها و حالات مختلف چرخش را می توان از آنها
گرفت و همچنین این که کنترل این موتور ها بسیار آسان تر از سایرین است به طوری که
عمدتا به وسایل کنترل سرعت اضافی از قبیل ترمز های الکتریکی و مکانیکی نیازی
ندارند.
موتور ها مهمترین اجزایی هستند که در لوازم برقی گردنده بکار می روند.موتور ها
انرژی الکتریکی را به انرژی مکانیکی تبدیل می کنند. الکتروموتور ها را می توان به
سه دسته کلی تقسیم کرد:
1- موتور های آسنکرون
2 - موتور های یونیورسال
3- موتور با قطب چاکدار
1- موتور های آسنکرون:
که با برق متناوب کار می کنند از دو قسمت روتور واستاتور ساخته شده اند.با روشن
شدن موتور سیم پیچ های درون شیار های استاتور یک میدان مغناطیسی دوار بوجود می
آورند که این میدان برروتور که قسمت گردنده موتور ودارای محور انتقال حرکت می باشد
نیز اثر گذاشته ودر آن خاصیت مغناطیسی بوجود می آید .به هر حال با بوجود آمدن قطب
های مغناطیسی هم نام وغیرهم نام عمل جذب ودفع انجام شده که باعث حرکت چرخشی روتور
می گردد.برای راه اندازی موتور ها از حالت سکون روش های مختلفی بکار می برند که
مهمترین آن ها عبارتند از:
الف- آسنکرون با راه انداز غیر خازنی (کلاجی ) در این موتور به غیر از سیم پیچی
های اصلی یک سری سیم پیچ کمکی نیز قرار دارد که میدان مغناطیسی دیگری با فاصله
زمانی با میدان مغناطیسی اصلی بوجود می آورد.که باعث چرخش پرقدرت تر موتور می
گردد. پس از این که سرعت موتور به 75 درصد سرعت اسمی رسید کلاج که تحت تاثیر نیروی
گریز از مرکز کار می کند به عنوان یک کلید عمل کرده وسیم پیچ کمکی را از مدار خارج
می کند.
ب - آسنکرون با راه انداز خازن موقت - این موتور ها دارای علامت اختصاری CSMمی باشند ودارای یک خازن الکترولیتی با ظرفیت
حدود 200 الی 500 میکرو فاراد است که باسیم پیچ کمکی بطور سری بسته شده وهر دوی
آنها باسیم پیچ اصلی موازی بسته می شوند. خازن وسیم پیچ کمکی یک اختلاف فاز ودو
میدان مغناطیسی بوجود می آورد که باعث چرخش موتور می گردد. در این موتور نیز کلید
گریز از مرکز سیم پیچ کمکی را از مدار خارج می کند.
ج - آسنکرون با راه انداز خازن موقت وخازن دایم.(با علامت اختصاری TCM) - یکی از خازن ها پس از راه اندازی از مدار خارج شده وخازن دیگر
در حالتی که با سیم پیچ کمکی سری می باشد در مدار باقی می ماند.
د - آسنکرون با راه انداز خازن دایمی ( PSCM) در این موتور ها که دارای قدرت کم تری نسبت به موتور های قبلی
هستند از یک خازن که با سیم پیچ کمکی سری بسته شده است استفاده شده و کلید گریز از
مرکز ندارند بنابر این خازن به همراه سیم پیچ کمکی همیشه در مدار باقی است.
2- سطح مقطع سیم های کمکی همیشه از سیم های اصلی کمتر است.
3- سیم پیچ کمکی دارای مقاومت بیشتری (اهم بیشتر ) نسبت به سیم پیچ اصلی است
وضمنا" خازن با سیم پیچ کمکی سری شده است.
عیب یابی موتور های آسنکرون - معیوب شدن موتور ها یا مربوط به قطعات برقی مثل سیم
پیچ ها وخازن است یا مربوط به قطعات مکانیکی مثل بلبرینگ و بوشن ها .
علت1 -جایی از مدار قطع است.
رفع عیب1- با آوامتر تمام مدار شامل پریز،دوشاخه ،سیم های رابط،کلیدها واتصالات در
تخته کلم موتور را بر رسی وعیب مربوطه را بر طرف می نماییم.
عیب2- موتور اصلا"روشن نشده وجریانی از مدار عبور نمی کند.
علت2 -سوختن فیوز.
رفع عیب2-ابتدا علت سوختن فیوز که مربوط به اتصالی می باشد را بررسی نموده پس از
آن به تعویض فیوز می پر دازیم.
عیب3-موتور پس از روشن شدن خیلی زود داغ می شود.
علت3-موتور نیم سوز است.
رفع عیب3- در هر کدام از سیم پیچ های کمکی واصلی میتواند اتصال حلقه ویا اتصال
کلاف به کلاف بوجود آمده باشد.بنابر این مسیر جریان الکتریکی کوتاه شده در نتیجه
میدان مغناطیسی مناسب برای گردش بوجود نمی آید وباعث داغی موتور میشود.موتور های
نیم سوز جریان بیشتری نسبت به موتور های سالم مشابه خود دریافت می کنند. برای رفع
عیب در صورتی که محل اتصالی مشخص باشد وبتوان به نحوی آن را عایق نمود اقدام کرده
ودر غیر این صورت موتور باید دو باره سیم پیچی شود.
عیب4- موتور پس از روشن شدن خیلی زود داغ می شود.
علت4- زیاد بودن بار موتور.
رفع عیب 4- هر موتوری دارای توان مکانیکی مشخص است در صورتی که بیش از توان مربوطه
از موتور نیرویی خواسته شود جریان بیشتری از سیم ها عبور می کند که با سطح مقطع
وتعداد دور آن ها همخوانی ندارد وباعث گرما در موتور و آسیب دیدن آن خواهد شد
.برای رفع عیب باید بار موتور را کم نموده واز کار مداوم آن خود داری کرد.
عیب5- موتور پس از روشن شدن خیلی زود داغ می شود وزیر بار می خوابد.
علت 5- عمل نکردن کلید گریز از مرکز .
رفع عیب 5 - علاوه بر جریان در یافتی توسط سیم پیچ اصلی ،سیم پیچ کمکی نیزچون از
مدار خارج نمی شود جریان دریافت می کند .برای اطمینان از صحت عمل کرد کلید گریز از
مرکز باید به صدای کنتاکت آن در حالت دور گرفتن موتور وهمچنین از دور افتادن آن
گوش کرد .برای رفع عیب باید کلید سرویس ویا تعویض شود.
عیب 6- با روشن کردن موتور صدای زیادی شنیده می شود ولی به گردش در نمی آید.
علت 6- خرابی کلید گریز از مرکز .
رفع عیب 6- درصورتی که کنتاکت های کلید در حالتی که موتور خاموش بوده وصل نشده
باشد.درزمان شروع بکار ،سیم پیچ راه انداز در مدار قرار نگرفته وطبیعتا"موتور
بگردش نمی افتد.برای رفع عیب کلید را با آوامتر امتحان ودر صورت معیوب بودن تعویض
می نماییم.
عیب 7- با روشن شدن موتور صدای زیادی شنیده می شود ولی به گردش در نمی آید.
علت 7 - قطعی سیم پیچ اصلی یا کمکی .
رفع عیب 7 - به کمک آوامتر هر دو مدار را امتحان ودر صورت مشخص بودن محل پارگی ،آن
را تعمیر می نماییم.
عیب 8 - با روشن شدن موتور صدای زیادی شنیده می شود ولی به گردش در نمی آید.
علت 8 - نیم سوز بودن یا سوختگی موتور .
رفع عیب 8 - موتور سریعا"داغ شده وجریان زیادی می کشد همچنین بوی سوختگی ویا
دود از مشخصه های آن است.رفع عیب سیم پیچی مجدد است.
عیب 9 - با روشن کردن موتور صدای زیادی شنیده می شود ولی به گردش در نمی آید.
علت 9 - خرابی خازن.
رفع عیب 9 - خازن ها به منظور راه اندازی موتور بکار رفته اند خازن را مطابق با
مطالبی که در مورد عیب یابی خازن ها گفتیم آزمایش نموده در صورت نیاز آن را تعویض
می کنیم.
عیب 10 - با روشن کردن موتور فیوز عمل کرده مدار قطع می شود.
علت 10 - اتصال کوتاه در مدار اصلی موتور .
رفع عیب 10 - دوشاخه ،سیم های رابط وجعبه اتصالات موتور را بررسی کرده در صورت
پیدا کردن محل اتصالی آن را مرتفع می نماییم.
عیب 11 - با روشن کردن موتور فیوز عمل کرده مدار قطع می شود.
علت 11 - سوختگی کامل موتور
رفع عیب 11 - با مشاهده استاتور وسیم پیچ های مربوطه عیب حاصل تایید گردیده وبرای
رفع آن باید موتور سیم پیچی گردد.
عیب 12 - با روشن کردن موتور فیوز عمل کرده مدار قطع می شود.
علت 12 - اتصال کوتاه در خازن
رفع عیب 12 - اگر با جدا کردن خازن از مدار و به برق زدن موتور فیوز دیگر عمل نکرد
عیب از خازن است وباید آن را تعویض نمود.
علت 1 -بطور کلی خرابی بلبرینگ ها ویاطاقان های دو سر محور موتور .
رفع عیب 1 - خرابی بلبرینگ ها شامل الف - ترک برداشتن حلقه های بلبرینگ،ترک بر
داشتن ساچمه ها و غلطک ها .ب - بوجود آمدن حفره وشیار در سطح داخلی حلقه ها که علت
آن وجود ذرات سخت بین ساچمه وحلقه می باشد.ج - گریپاژ (عدم چرخش ساچمه ها ) که
ناشی از کثیفی و سخت شدن گریس بلبرینگ می باشد. د - فرسودگی وپوسیدگی - که به علت
جازدن نادرست بلبرینگ ونفوذ رطوبت وعدم گریس کاری مناسب بوجود می آید. برای تشخیس
عیوب گفته شده بلبرینگ را از نظر ظاهری مشاهده ولقی بین حلقه وساچمه را امتحان می
کنیم . همچنین با چرخش بلبرینگ اگر صدای غیر عادی شنیده شود دلیل برخرابی آن می
باشد که باید تعویض گردد.
عیب 2 - گاهی اوقات محور موتور با صدای زیادی می چرخد.
علت 2 - چرخش حلقه بیرونی بلبرینگ در جای خود.
رفع عیب 2 - جازدن نادرست بلبرینگ وعدم گریس کاری می تواند باعث لقی بلبرینگ در
جای خود شود . رفع عیب-تعویض بلبرینگ در صورت معیوب بودن بوش زدن وتراش کاری جای
آن یا تعویض دری موتور.
2-موتور های یونیورسال
این موتور ها که هم با جریان متناوب وهم با جریان مستقیم کار می کنند از دو قسمت
اصلی تشکیل شده اند:
الف:قطب ها (بالشتک ها )
ب - آرمیچر
در این موتور ها میدان مغناطیسی قطب ها بر خلاف موتور های آسنکرون دوار نیست وسیم
پیچ آرمیچر که قسمت گردنده موتور است با سیم پیچ قطب ها سری بسته شده است . پس از
عبور جریان از مدار فوق خطوط قوای مغناطیسی قطب ها با خطوط قوای آرمیچر عکس العمل
نشان داده وباعث گردش موتور می شود .سرعت این موتور ها بالا بوده وخیلی سریع به
سرعت نهایی می رسند. از این موتور ها در اکثر لوازم برقی خانگی مثل چرخ گوشت ،آب
میوه گیری ،هم زن ،آسیاب و... استفاده می شود. برای برقراری ارتباط قطب ها با
آرمیچر که گردان می باشد از قطعه ای بنام کلکتور استفاده می شود . کلکتور از تیغه
های مسی کنار هم تشکیل شده است که به شکل استوانه روی محور قرار دارد . تیغه
ازهمدیگر واز محور آرمیچر بوسیله میکا عایق شده اند وسیم پیچ های داخل شیار آرمیچر
به وسیله پیچک ها به یکدیگر وصل می شوند. دو قطعه ذغال به همراه فنر پشت آن ها
ارتباط قطب ها با کلکتور را میسر می سازد.
علت 1 - نبودن برق.
رفع عیب 1 - پریز ،دوشاخه وسیم رابط را با آوامتر آزمایش نموده ورفع عیب می کنیم.
عیب 2 - موتور روشن نمی شود.
علت 2 - کوتاه شدن ذغال ها.
رفع عیب 2 - چون ذغال ها جزیی از مدار سری موتور می باشد.با کوتاه شدن آن ها ممکن
است مدار قطع گردد وموتور روشن نشود با تعویض ذغال رفع عیب می شود در صورت نبودن
ذغال در اندازه مورد نظر می توان از ذغال بزرگ تر استفاده کرده وبا سوهان آن را به
اندازه دلخواه در آورد.
عیب 3 - موتور روشن نمی شود.
علت 3 - خرابی فنر ذغال ها
رفع عیب 3 - به منظور درگیر بودن همیشگی ذغال با کلکتور از قطعه ای فنر در پشت
ذغال استفاده می شود گاهی در اثر رطوبت ویا کار زیاد خاصیت خود را از دست داده
ومدار قطع می گردد. باتعویض فنر رفع عیب می شود
بنابراین برای کم کردن جریان شروع به کار موتور باید چاره ای اندیشید؟؟
معمولاً به روشهای زیر راه اندازی میشود در نتیجه جریان راه اندازی کم میشود :
1. به طور مستقیم
2. توسط کلید یا مدار ستاره – مثلث
3. توسط کمپانساتور
4. راه اندازی بوسیله اضافه کردن مقاومت در مدار روتور
5. راه اندازی بوسیله داخل کردن مقاومت در مدار استاتور
1- راه اندازی موتور به طور مستقیم : برای موتورهایی که بزرگ نیستند و آمپر
زیادی از شبکه نمی کشند بوسیله یک کلید سه قطبی به شبکه متصل میشوند .
2-راه اندازی ستاره – مثلث : ابتدا ولتاژ اولیه را که بر هر فاز متصل میشود ، را
کم مى کنیم سپس وقتی که موتور به دور نرمال خود رسید ولتاژی که به هر فاز می رسد
را زیاد می کنیم .
بنابراین در لحظه اول کلید به حالت ستاره بوده یعنی ولتاژ دو سر هر فاز به u/√3 تقلیل می یابد در نتیجه موتور با توان 3/1 توان نامی خود کار می
کند .
استعمال کلید روی انواع موتورها با روتور قفسه ای یا روتور سیم پیچی امکان پذیر
است . ولی در موتورهایی که با بار زیاد کار می کنند از کلید برای راه اندازی
استفاده نمی شود . چون گشتاور مقاوم بار زیاد است .
3-راه اندازی توسط کمپانساتور : این وسیله راه اندازی که اتوترانسفورماتور کاهنده
است بین موتور و شبکه قرار می گیرد . این طریق راه اندازی به دلیل اینکه جریان
شروع به کار و گشتاور شروع به کار هر دو به یک نسبت پایین می آیند خیلی خوب است .
ولی چون هزینه آن گراناست فقط در موتورهایی که قدرت زیاد دارند استفاده می شوند.
4-راه اندازی موتورهای قفسه ای بوسیله قرار دادن مقاومت سر راه استاتور : برای
جلوگیری از عبور جریان زیاد در موقع راه اندازی موتور میتوان مقاومت هایی به طور
سری سر راه سیم پیچی هایموتور قرار دارد . و به تدریج که موتور دور می گیرد دسته
مقاومتهای راه انداز را به طرف چپ حرکت داده در این صورت کم کم مقاومتها از سر راه
مدار خارج میشود.
این طریق راه اندازی به دلیل تلفات انرژی در مقاومتها زیاد و نیروی کشش در لحظه
شروع به کار کم ، استعمال کمی دارد.
5-راه اندازی موتورهای آسنکرون با روتور سیم پیچی با قرار دادن مقاومت سر راه
روتور : تمام مقاومتهای راه انداز را سر راه سیم پیچی روتور قرار داد . بدین وسیله
مقاومت مدار سیم پیچی روتور را به حداکثر مقدار خود میرسانند و سپس استاتور را به
شبکه برق وصل می کنند . مقاومت روئستای روتور به تدریج از مدار خارج میشود .
اگر این سر سیم ها اشتباه وصل شود در عملکرد موتور چه تغییری حاصل می شود ؟
سیم§ پیچی که از فاز Rتغذیه می کند شروع سیم پیچی را (U ) و انتهای آنرا با ( X )
§ سیم پیچی که از فاز S تغذیه می کند شروع سیم پیچی را (V ) و انتهای آنرا با ( Y )
سیم پیچی که از فاز T تغذیه می کند شروع سیم پیچی را (W ) و انتهای آنرا با (§ Z )
قبل از انجام کار اگر بار روی موتور قرار دارد بار را از روی موتور بردارید. (
تسمه یا ....)
1. تغییر فرکانس ولتاژ شبکه
2. تغییر قطبها
3. داخل کردن مقاومت در مدار روتور
4. تغییر ولتاژ موتور
1-تغییر دور بوسیله تغییر فرکانس : با تغییر فرکانس سرعت سنکرون تغییر میکند و دور
موتور تغییر میکند . میتوان برای تغییر فرکانس از یک مولد یا مبدل فرکانس استفاده
نمود . و یک یا چند موتور القایی که در شرایط مشابهی کار می کنند بوسیله آنها
تغذیه شوند . مانند موتور ماشینهای کارخانه فولاد سازی و موتورهای محرک ماشین
نساجی
2-تغییر دور بوسیله تغییر عده جفت قطبها : این تغییر را در موتورهای آسنکرونی است
که بتوان با سیم پیچهای آن تغییر قطب داد که این حالت در موتورهای دو سرعته (
دالاندر ) دیده می شود که میتوان با کلید ( دالاندر ) دور موتور را تغییر داد .
3-تغییر دور با داخل کردن مقاومت در مدار روتور : در موتورهای آسنکرون با روتور
سیم پیچر شده با تغییر مقاوت مدار روتور میتوان سرعت گردش روتور را تنظیم کرد ولی
چون راندمان موتور بر اثر تغییر دور تغییر میکند در نتیجه کاربرد این روش خیلی کم
است
4-تغییر دور با تغییر ولتاژ : از این روش در موتورهای کوچک مانند پنکه و ...
استفاده میشود .
بر خلاف موتور آسنکرون با روتور قفسه ای
که جریان§ شروع به کار آنها کم است جریان شروع به کار کمی دارد .
سرعت آن در مقابل§ بارهای مختلف تقریباً
ثابت است .
تعداد دور آن تا حدی قابل تنظیم است .( با§ کم و زیاد کردن رئوستا
راه انداز )
میتوان تا حدی بار آن را زیاد کرد .§
ضریب قدرت آن در موقعیکه بار به حد نرمال
نیست کم§ می باشد .
ضریب قدرت آنها نسبت به ضریب قدرت موتور
آسنکرون با روتور قفسه ای§ کمتر است.
روتور این موتور به صورت یکپارچه یا از ورقهای مغناطیسی ساخته می شود و بر روی آن
یک سیم پیچی جریان مستقیم به نام سیم پیچ تحریک نصب می شود.
جریان تغذیه سیم پیچی تحریک روتور، از طریق دو حلقه که بر روی محور روتور نصب شده
به وسیله جاروبکها تأمین می شود و روتور این موتورها عملا بصورت یک مغناطیس
الکتریکی (چرخ قطب) رفتار می کند که تعداد قطبهای روتور به اندازه قطبهای سیم پیچی
استاتور خواهد بود.
طرز کار: هنگام وصل استاتور به شبکه سه فاز ، یک میدان دوار که سرعت آن متناسب با
فرکانس شبکه و تعداد قطبهای استاتور است در آن بوجود می آید و سطح روتور را جاروب
می کند.قطبهای روتور از طریق قطبهای غیر همنام استاتور جذب و لحظه ای بعد مجدداً
این قطبها به وسیله قطبهای همنام استاتور دفع خواهند شد. پس میانگین گشتاور صفر و
روتور حرکت نمی کند قطبهای روتور به دلیل سنگینی و اینرسی موجود در آن نمی توانند
به سرعت همراه میدان دوار استاتور بچرخند. پس باید با یک وسیله کمکی (راه انداز)
ابتدا سرعت روتور را به نزدیکی سرعت میدان دوار استاتور رساند تا روتور بتواند
همراه میدان دوار چرخش کند.
سؤال: گشتاور راه اندازی این موتورها چقدر است؟
1-کاهش سرعت میدان مغناطیسی استاتور: تا حدی که روتور بتواند طی نیم سیکل چرخش
میدان مغناطیسی شتاب بگیرد و با آن قفل شود . این کار را می توان با کاهش فرکانس
منبع تغذیه انجام داد.
2-استفاده از یک گرداننده اولیه: که سرعت موتور را تا حد سرعت سنکرون بالا میبرد و
با طی مراحل موازی کردن ماشین مثل ژنراتور روی خط آورده شود. پس از این مراحل
خاموش کردن با جدا کردن گرداننده اولیه ماشین سنکرون را تبدیل به موتور خواهد کرد.
3- استفاده از سیم پیچ های میرا کننده که در انتهای قطبین روتور نصب می شود.
در موتورهای سنکرون سرعت حرکت روتور در هر حال برابر با سرعت میدان دوار استاتور
خواهد بود و افزایش بار فقط عقب ماندگی روتور نسبت به میدان را موجب می شود.
اختلاف فاز این دو میدان Bs وBR همان زاویه گشتاور است که از0 تا90 تغییر می کند. البته اگر
افزایش بار بیش حد باشد. موتور از حالت سنکرونیزم خارج خواهد شد که اصطلاحا آن را
ناپایدار می نامیم ضمنا هنگام کار با سرعت سنکرون با تغییرات جریان تحریک امتداد
جریان آرمیچر و ضریب قدرت ماشین از حالت پس فازی به اهمی و پیش فازی قابل کنترل
خواهد بود که از این خاصیت جهت اصلاح ضریب قدرت شبکه استفاده می شود که به
موتورهای سنکرون پر تحرک (کاردر حالت پیش فازی) خازنهای سنکرون نیز گفته می شود .
(موتورهای سنکرون در حالت کار پیش فازی کم تحریک هستند.) مدار معادل تکفاز موتور
سنکرون بصورت زیر می باشد.
کنترل حرکتی در حوزه الکترونیک به معنی کنترل صحیح حرکت یک شی بر اساس فاکتور هایی
مانند سرعت - مسافت- بارگیری و یا ترکیبی از کلیه موارد می باشد. امروزه سیستم های
کنترل حرکتی بسیار زیادی مو جود است که می توان از stteper motors- linear stepper motors- Dc
brush-...
نام برد. در اینجا به توضیحات مختصری از تکنولوژی step motor ها اکتفا می کنیم.
در تئوری از stepper
motor به
عنوان یک شگفتی در ساده سازی یاد می شود. اساسا هر stepper یک مو تور با یک میدان مغناطیسی می باشد که خود به صورت الکتریکی
رو شن شده و باعث چرخش دایرهای آرماتور آهنربا می شود.
قسمت کنترل کننده حرکت از یک کابل میکرو پروسسور جهت تولید پالس های پله ای و
ایجاد سیگنال های مسیر حرکت تشکیل شده است. و هر indexer بایستی قادر به انجام دستورات اجرایی باشد.
motion driver و یا همان آمپلی فایر
دستورات سیگنال های رسیده از منبع را به قدرت مورد نیاز برای چرخش پره های مو تور
می شود. امروزه تعداد زیادی driver با
قدرت های مختلف جریان و ولتاژ در ساختار تکنولوژی یافت می شود.
هر stepper motor یک وسیله مغناطیسی است
که هر پالس دیجیتال را به یک چرخش مکانیکی مانند چرخش پره تبدیل می کند. از مزیت
های آن به هزینه پایین- امنیت بالا - ساده بودن و قابل استفاده بودن در هر محیط می
توان اشاره کرد.
permanent magnet
hybrid
چگونگی طراحی هر driver تعیین کننده نوع خروجی
هر stepper motor است که دارای سه نوع full- half- microstep می باشد.
Full step:
استاندارد طراحی دارای 50 چرخندا دندانه دار و تو لید کننده 20 پالس پله ای برای
چرخش مکانیکی هر عنصر است.
Half step:
به معنی آن است که مو تور می تواند دارای 400 حرکت پله ای در هر دوره باشد. در این
سیستم یک چرخنده خود دارای انرژی ست که باعث چرخش تناوبی دو چرخنده دیگر می شود. half stepping یک راه حل عملی تر در صنعت است.
microstep:
یک تکنولوژی نسبتا جدید است که جریان چرخش هر چرخنده را کنترل می کند. این کنترل
در سطحی انجام می شود که تقسیم کننده ای فرئی دور تری در بین قطبها قرار گیرد.
یکی از روشهای راه اندازی موتورهای القایی راه اندازهای نرم می باشد که از طریق
آنها موتور ها از طریق کنترل ولتاژ-فرکانس در یک زمان مشخص بتدریج از سرعت صفر به
سرعت نامی می رسند که این روش امروزه کاملا جا افتاده است.
راه اندازهای نرم تنها در هنگام راه اندازی بکار می روند و معمولا پس از راه
اندازی توسط یک کنتاکتور بای پس از مدار خارج می گردند. این راه اندازها می توانند
به سیستم از کار اندازی نرم نیز مجهز باشند که کاربرد های ویژه ای دارد. ضمن این
که عموما این نوع راه اندازها به ترمز الکترونیکی از طریق تزریق جریان مستقیم نیز
مجهز می باشند.
سازندگان این نوع راه اندازها معمولا حفاظت های مورد نیاز برای موتور را نیز در
راه اندازها تعبیه می کنند که از این طریق حجم راه انداز محدود می گردد. ضمن این
که با استفاده از این گونه راه اندازها نیاز به در نظر گرفتن کنتاکتور اصلی نیست .
حفاظت هایی که معمولا در راه اندازهای نرم پیش بینی می گردد بشرح زیر است :
- حفاظت در مقابل اضافه بار
- حفاظت در مقابل توالی معکوس فازها و دو فاز شدن
- حفاظت در مقابل افزایش حرارت سیم پیچ های موتور که از طریق سنسورهای حرارتی
انجام می گردد.
- حفاظت در مقابل کاهش ولتاژ
و موارد دیگر که بسته به سازنده راه انداز می تواند تغییر کند.
نکته مهم اینجاست که هنگام بسته شدن کنتاکتور بای پس حفاظت های تعبیه شده در راه
انداز همچنان فعال می باشد چون مسیر بای پس تنها تایرستورها را بای پس می کند.
جهت بستن کنتاکتور بای پس بعد از راه اندازی موتور عموما از یک کنتاکت راه انداز
استفاده می گردد که بعد از رمپ راه اندازی به صورت خودکار فعال می گردد. لازم به
ذکر است که برخی از راه اندازهای نرم دارای سیستم بای پس داخلی هستند که دیگر نیاز
به در نظر گرفتن کنتاکتور بای پس نیست.
با توجه به این که تایرستورهای بکار رفته در راه اندازهای نرم حرارت تولید می کنند
اینطور استنباط می گردد که در تابلوهای دارای راه اندازهای نرم لازم است از فن
استفاده گردد. ولی با توجه به کار راه انداز تنها در مرحله استارت ، حرارت تولید
شده تنها به مرحله راه اندازی محدود می گردد و بنابر این در راه اندازهای دارای
سیستم بای پس تنها تعبیه شکاف های عبور هوا متناسب با درجه حفاظتی تابلو توصیه می
گردد. ضمن این که این گونه راه اندازها عموما مجهز به هیت سینک و فن هستند.
اکثر راه اندازهای نرم مجهز به پورت های اطلاعاتی مانند مودباس- پروفی باس و ....
جهت تبادل اطلاعات می باشند که از این طریق می توان از کلیه اطلاعات داخل راه
انداز مطلع گردید به این طریق کنترل این راه انداز ها توسط سیستم هایی مانند DCS بسیار ساده می باشد.
طرحهای بسیاری برای موتورهای خطی ارائه شده است که میتوان آنها را به دو دسته
تقسیم کرد: موتورهای خطی شتاب بالا و شتاب پایین. موتورهای شتاب پایین برای
قطارهای مگلیو و دیگر کاربردهای حمل و نقلی روی زمین مناسب هستند. موتورهای شتاب
بالا معمولاً خیلی کوتاه هستند و برای شتاب دادن به جسمی تا سرعت بسیار زیاد و سپس
رها کردن آن به کار میروند. این موتورها معمولاً برای مطالعات برخورد سرعت بالا
به عنوان تسلیحات نظامی یا به عنوان راهاندازنده جرمی برای پیشرانه فضاپیما به
کار میرود. موتور خطیای که برای شتاب دادن به یون ها یا ذرههای زیر اتمی به کار
میرود، یک شتاب دهنده ذره نامیده میشود. با نزدیک شدن ذرهها به سرعت نور، طراحی
موتورها معمولاً متفاوت میشود و این ذرهها نیز عموماً داری بار الکتریکی هستند.
به علت این ویژگیها، موتور خطی اغلب در پیشرانه قطار مگلیو به کار میرود هر چند
که میتوان صرف نظر از پرواز مغناطیسی از آنها استفاده کرد، مانند استفاده در فنآوری
انتقال پیشرفته و سریع نور که در سیستم ترن آسمانی ونکوور ، Scarborough RT تورنتو، ترن هوایی فرودگاه JGK نیویورک و Putra RTL
کووالالامپور به کار میرود. از این فنآوری با تغییراتی در برخی از قطارهای بازی
نیز استفاده میشود.
موتورهای خطی عمودی نیز برای مکانیسمهای بالابر در معدن های عمیق پیشنهاد شده
است.
طراحی موتورهای شتاب بالا به دلایل متعددی مشکل است. آنها مقادیر بزرگ انرژی را در
مدت زمان کوتاه نیاز دارند. که برای هر پرتاب در فضا نیاز به 300GJ در مدت زمان کمتر از یک ثانیه دارد. ژنراتورهای الکتریکی معمولی
برای چنین نوع از باری طراحی نشدهاند اما روشهای ذخیره انرژی الکتریکی کوتاه مدت
را میتوان مورد استفاده قرار داد. خازن ها پر حجم و گران هستند اما میتوانند به
سرعت مقادیر بزرگ انرژی را فراهم کنند. ژنراتورهای هم قطب را میتوان برای تبدیل
سریع انرژی جنبشی یک چرخ طیار به انرژی الکتریکی به کار برد. موتورهای خطی شتاب
بالا نیازمند میدانهای مغناطیسی بسیار قویای نیز هستند، در واقع میدانهای مغناطیسی
اغلب آنقدر قوی اند که اجازه استفاده از ابر رساناها را نمیدهند. اما با طراحی
دقیق میتوان این مشکل را حل کرد.
دو طرح متفاوت پایهای از موتورهای خطی شتاب بالا ابداع شده است: تفنگهای ریلی و
تفنگ های کویلی.
موتورهای یونیورسال یک مشخصه گشتاور- سرعت با افت زیاد از یک موتور DC را دارد.
موتور القایی تک فاز
تورک آغازین کم است مثلا 100 تا 175 درصد تورک ارزیابی شده.موتور برای استارت
جریانی زیاد طلب می کند.تقریبا 700 تا 1000 درصد جریان ارزیابی شده.تورک بیشینه
تولید شده نیز در محدوده 250 تا 350 درصد از تورک براوردشده می باشد.
کاربریهای خوب برای موتورهای فاز شکسته شامل سمباده (آسیاب) های کوچک , دمنده ها و
فنهای کوچک و دیگر دستگاههایی با نیاز به تورک آغازین کم با و نیاز به قدرت 1/20
تا 1/3 اسب بخار می باشد.از استفاده از این موتورها در کاربریهایی که به دوره های
خاموش و روشن و گشتاور زیاد نیازدارند خود داری نمایید.
نوع اصلاح شده ای از موتو با استارت خازنی ، موتور با استارت مقاومتی است.در این
نوع موتور خازن استارت با یک مقاومت جایگزین شده است.موتور استارت مقاومتی در
کاربریهایی مورد استفاده قرار می گیرد که میزان گشتاور استارتینگی کمتر از مقداری
که موتور استارت خازنی تولید می کند لازم است.صرف نظر از هزینه این موتور امتیازات
عمده ای نسبت به موتور استارت خازنی ندارد.
این موتورها در انواع مختلف کاربریهای پولی و تسمه ای مانند تسمه نقاله های کوچک ,
پمپها و دمنده های بزرگ به خوبی بسیاری از خود گردانها و کاربریهای چرخ دنده ای
استفاده می شوند.
موتورهای PSC امتیازات فراوانی
دارند.طراحی موتور براحتی برای استفاده با کنترل کننده های سرعت میتواند اصلاح
شود.همچنین می توانند برای بازدهی بهینه و ضریب توان بالا در فشار برآورد شده
طراحی شوند.آنها به عنوان قابل اطمینان ترین موتور تک فاز مطرح میشوند.مخصوصا به
این خاطر که به سوئیچ گریز از مرکز نیازی ندارند.
موتورهای PSC بسته به طراحیشان
کاربری بسیار متنوعی دارند که شامل فنها , دمنده ها با نیاز به گشتاور استارت کم و
چرخه های کاری غیر دائمی مانند تنظیم دستگاهها (طرز کارها) , عملگر درگاهها و
بازکننده های درب گاراژها میشود.
این نوع موتور می تواند ... و بازده بیشتر طراحی شود.این موتور بخاطر خازنهای
کارکرد و استارت و سوئیچ گریز از مرکز آن پرهزینه است.
این موتور می تواند در بسیاری از کاربریهایی که از هرموتور تک فاز دیگری انتظار
میرود استفاده شود.این کاربریها شامل ماشینهای مرتبط با چوب , کمپرسورهای هوا , پمپهای آب فشار قوی
, پمپهای تخلیه و دیگر کاربردهای نیازمند گشتاورهای بالا در حد 1 تا 10 اسب بخار
می شوند.


























